Mouvement linéaire - Linear Move
Sélectionner Programme➔
A moins qu’une cible ne soit sélectionnée avant d’ajouter l’instruction, l’instruction mouvement va créer une nouvelle cible et seront liés. Si la cible change de position, le mouvement sera modifié aussi.
Les mouvements joints et linéaires réagissent de la même manière et peuvent facilement être échangés d’un type à l’autre.
De la même façon que pour un mouvement joint, s’il s’agit de la première instruction ajoutée au programme, deux instructions supplémentaires seront ajoutées avant le mouvement : Définir Ref.et Choisir Outil.
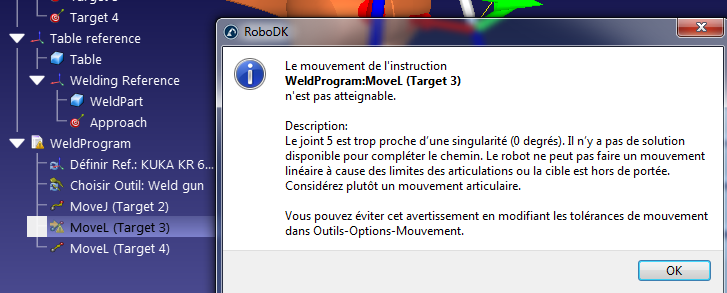
Contrairement au mouvement Joint, les mouvements linéaires sont sensibles aux situations de singularité robot et aux limites d’axes. Sur un robot 6 axes, il faut absolument éviter les situations de singularité en suivant des mouvements linéaires. L’image suivante montre un exemple illustrant que « Le mouvement de l’instruction n’est pas atteignable ».
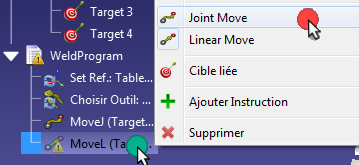
Si un mouvement linéaire n’est pas strictement nécessaire, faire un clic droit sur l’instruction et le changer en un mouvement Joint.
En parallèle, la cible, le TCP ou la position du repère de référence doit être modifié afin de n’avoir aucune singularité.