Paramétrage des Valeurs de Lissage
Sélectionner Programme➔
Sans instructions de lissage, le robot va atteindre une vitesse de 0 à la fin de chaque mouvement (sauf si le mouvement suivant est tangent avec le mouvement précédent). Cela permet d’éviter de grosses accélérations et changements rapides de vitesses afin d’assurer la meilleure précision de chaque mouvement.
Cette valeur est aussi connue comme Blending radius (Universal Robots), ZoneData (ABB robots), CNT/FINE (Fanuc robots), Cornering (Mecademic robots) ou $APO.CDIS/$APO.CPTP/Advance (KUKA robots).
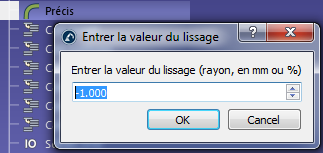
Certains contrôleurs nécessitent de définir cette valeur sous forme de pourcentage. Par exemple, sur un contrôleur Fanuc, pour obtenir la commande CNT5, vous devez entrer la valeur 5.
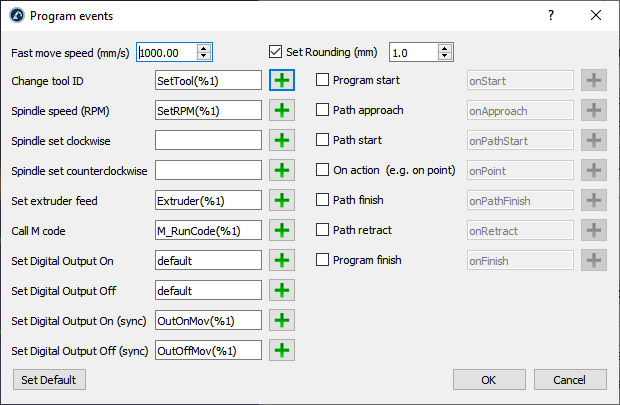
Vous pouvez également spécifier le paramètre de lissage dans la fenêtre Program Events si vous générez vos programmes pour de l’usinage robotisé, de l’impression 3D ou du suivi de courbes/points.