Paramétrer le repère de référence
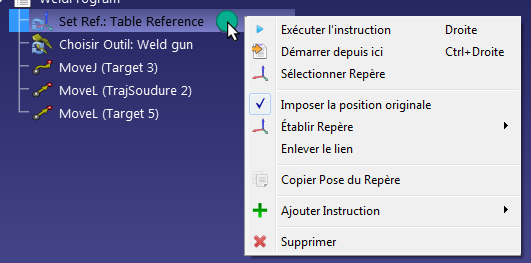
Sélectionner Programme ➔
Le repère est aussi une variable connue en tant que Work Object (Robots ABB), UFRAME (Robots Fanuc), FRAME (robots Motoman) ou $BASE (Robots KUKA)
Note :Les contrôleurs spécifiques acceptent le réglage des repères à l’aide d’un repère numéroté (contrôleurs Fanuc et Motoman). Dans ce cas, le nom du référentiel peut se terminer par un chiffre (tels que Frame 4 pour choisir le repère indexé 4).