Évènement de simulation
Sélectionner Programme➔
La simulation d’évènements dans l’interface utilisateur / GUI (graphical user interface) permet de :
3.Attacher un objet à un outil.
4.Détacher un objet d’un outil et le déposer sur un système de coordonnées.
5.Afficher un ou plusieurs objets ou outils.
6.Cacher un ou plusieurs objets ou outils.
7.Définir la position absolue d’un ou plusieurs objets ou repères.
8.Définir la position relative d’un ou plusieurs objets ou repères.
9.Mettre les articulations du robot à la position d’origine (home).
10.Déplacer un convoyeur.
11.Créer un objet.
12.Supprimer des objets.
13.Attendre un objet.
Note : Les évènements suivants ont été ajoutés depuis la version 6 de RoboDK et ne sont pas disponibles ou compatibles avec les versions précédentes de RoboDK : ramener le robot en position home, créer, supprimer et attendre un objet (évènements 7 à 10).
Par exemple, si le robot bouge à un endroit spécifique pour attraper un objet, il est possible de paramétrer un évènement Objet Attaché (Attach object) pour bouger cet objet en même temps que le robot. Après que le robot ait terminé son mouvement, il peut laisser l’objet. Il est possible de paramétrer Détacher objet (Detach object) pour laisser l’objet que l’outil a précédemment attrapé.
Attacher un objet
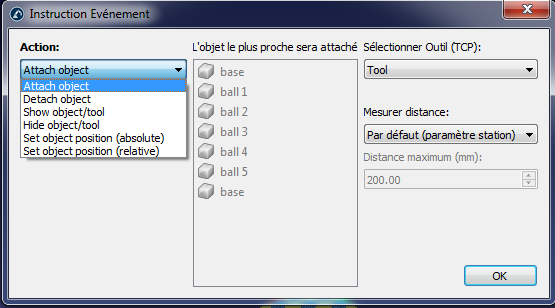
L’évènement de simulation Attacher un objet permet d’attacher un objet à un outil pour simuler une action de prise.
Lorsque l’action d’attacher un objet à un outil est déclenchée, l’objet le plus proche de l’outil sélectionné est attaché. Une tolérance par défaut de 200 mm est utilisée pour ignorer tout objet plus éloigné que cette distance.
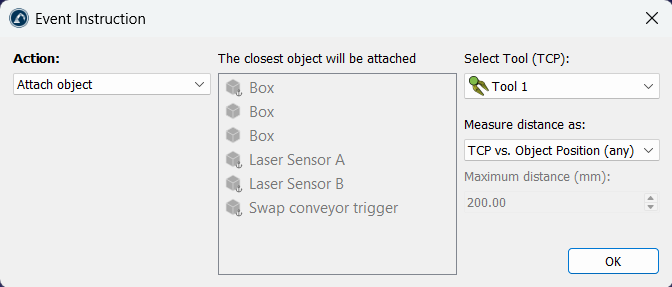
Si vous ne spécifiez pas de tolérance de distance, la valeur par défaut globale est utilisée (vous pouvez la modifier dans Outils►Options►Distance maximum pour attacher un objet à un outil de robot). De plus, par défaut, la distance est vérifiée entre l’emplacement du TCP et la référence de l’objet. Il est également possible d’utiliser la distance entre le TCP et la géométrie de l’objet en sélectionnant Vérifier la distance la plus courte entre le TCP et la forme de l’objet.
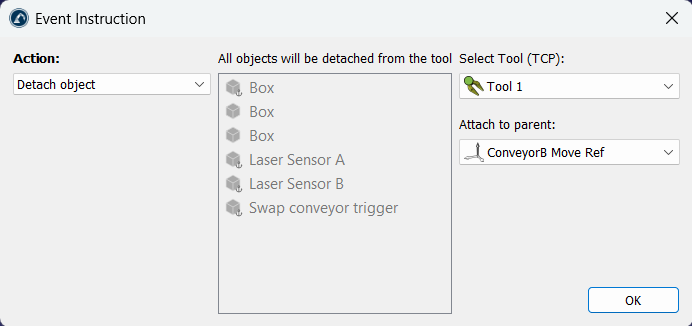
Détacher un objet
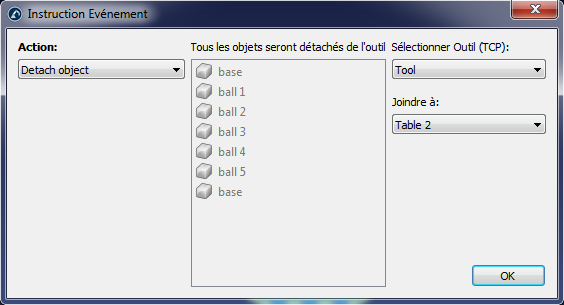
L’évènement de simulation Détacher un objet permet de détacher un objet d’un outil vers un autre objet ou système de coordonnées.
Vous devez choisir l’outil duquel les objets doivent être détachés, ainsi que le système de coordonnées ou l’objet auquel ils doivent être attachés ensuite.
L’évènement de simulation Détacher un objet permet de simuler une opération de dépose dans une application de prise et dépose (il effectue l’action opposée à l’évènement Attacher un objet).
Par exemple, si le robot se déplace vers un emplacement spécifique pour saisir un objet, vous pouvez paramétrer un évènement Attacher un objet pour déplacer cet objet en même temps que le robot. Ensuite, une fois que le robot s’est déplacé et qu’il est prêt à déposer les objets saisis, vous pouvez déclencher un évènement Détacher un objet pour libérer tous les objets que l’outil du robot a saisis.
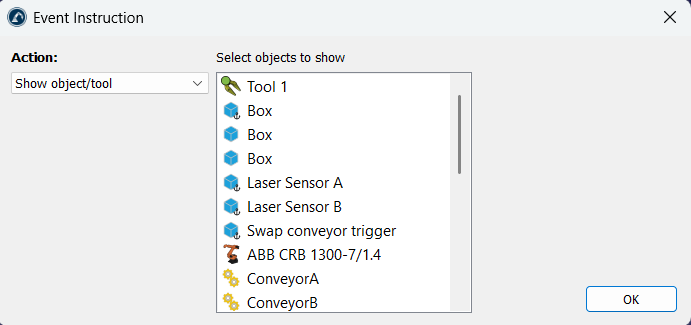
Afficher des objets ou des outils
L’évènement Afficher des objets ou des outils permet de rendre visibles un ou plusieurs objets, outils ou robots dans l’environnement de simulation.
Vous pouvez sélectionner un ou plusieurs éléments en maintenant la touche Ctrl enfoncée.
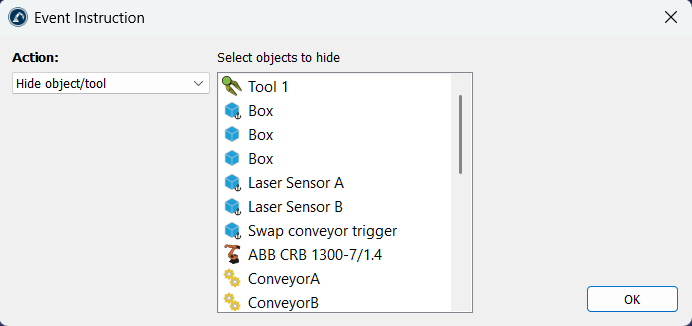
Masquer des objets ou des outils
L’évènement Masquer des objets ou des outils permet de rendre invisibles un ou plusieurs objets ou outils dans la simulation.
Vous pouvez sélectionner un ou plusieurs éléments en maintenant la touche Ctrl enfoncée.
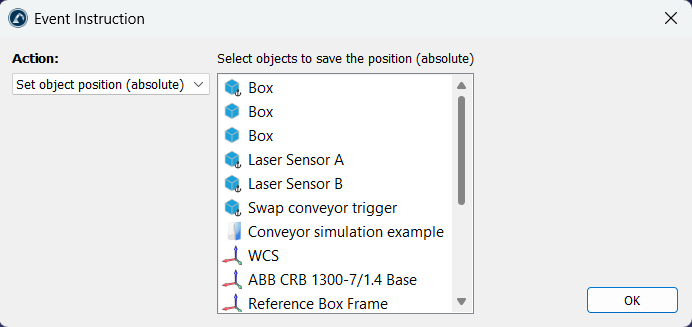
Définir la position absolue
L’évènement Définir la position de l’objet (absolue) permet de mettre à jour la position de chaque objet sélectionné lorsque cette action est déclenchée. Le repère parent auquel chaque élément est attaché n’est pas modifié : seule la position de chaque objet est mise à jour.
Vous pouvez sélectionner un ou plusieurs éléments en maintenant la touche Ctrl enfoncée. La position actuelle de l’élément est enregistrée lorsque vous cliquez sur OK.
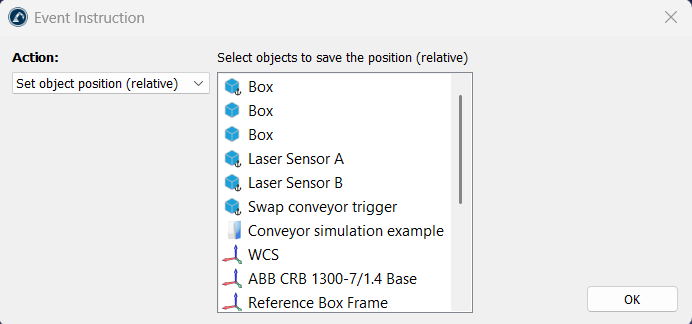
Définir la position relative
L’évènement Définir la position de l’objet (relative) permet de mettre à jour la position et le parent de chaque objet sélectionné lorsque cette action est déclenchée. Le repère parent auquel chaque élément est attaché est également modifié, et la position de chaque objet est aussi mise à jour.
Vous pouvez sélectionner un ou plusieurs éléments en maintenant la touche Ctrl enfoncée. La position actuelle de l’élément ainsi que l’élément parent auquel il est attaché sont enregistrés lorsque vous cliquez sur OK.
La différence entre cette instruction et l’instruction de position absolue est que celle-ci met également à jour l’élément parent auquel chaque objet est attaché.
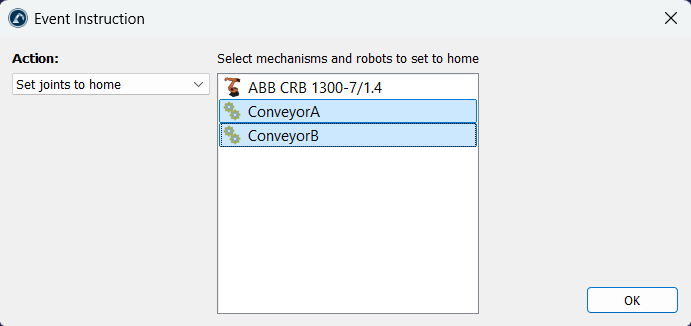
Ramener le robot en position home
L’évènement Définir les axes en position home déclenche le déplacement immédiat du robot ou du mécanisme sélectionné vers ses positions d’axes « home » définies (le mouvement n’est pas simulé dans le temps).
Ceci est utile lorsque vous devez réinitialiser une simulation et replacer les convoyeurs à leur position de départ.
Vous pouvez sélectionner un ou plusieurs éléments en maintenant la touche Ctrl enfoncée.
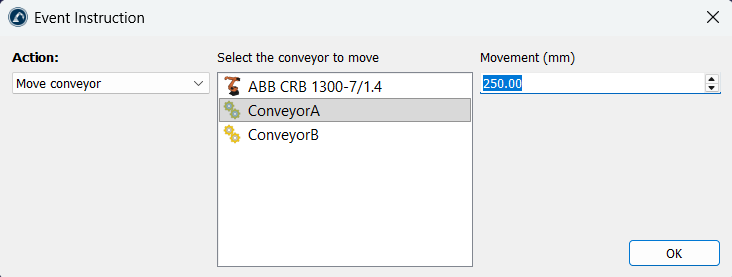
Évènement de déplacement du convoyeur
L’évènement Déplacer le convoyeur simule le déplacement du convoyeur sur une distance spécifique, en simulant l’effet du mouvement dans le temps.
Ceci est utile lorsque vous devez simuler un incrément spécifique pour traiter un objet sur le convoyeur une fois qu’il a parcouru une distance donnée.
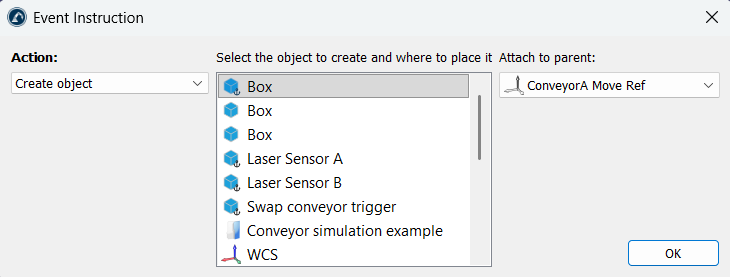
Créer un objet
L’instruction Créer un objet permet de simuler un alimentateur (feeder) en créant un nouvel objet dans l’environnement de simulation.
Vous devez sélectionner l’objet modèle à créer ainsi que le repère parent auquel les éléments doivent être attachés.
Cette action est utile pour créer de nouveaux objets sur un convoyeur.
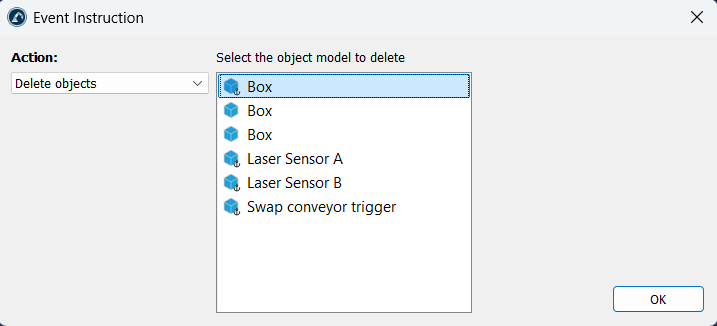
Supprimer des objets
L’instruction Supprimer des objets retire des objets de l’environnement de simulation.
Vous devez sélectionner un objet modèle que vous souhaitez supprimer. Tout objet correspondant au nom et à la géométrie de cet objet est supprimé lorsque cette action est déclenchée. L’objet modèle sélectionné ainsi que tout objet verrouillé ne sont pas supprimés.
Cette instruction permet de nettoyer une simulation terminée lorsque de nombreux objets ont été créés par l’instruction Créer un objet.
Attendre un objet
L’instruction Attendre un objet attend qu’un objet entre en contact avec un autre objet pour déclencher une action spécifique.
Cet évènement est utile lorsque vous souhaitez déclencher une action en fonction d’un contact entre objets. Il est courant de placer cette instruction seule dans un programme exécuté en boucle, qui effectue une action spécifique lorsqu’un objet entre en contact avec un capteur.
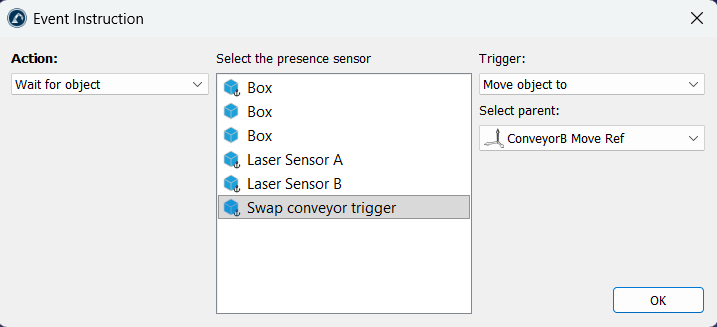
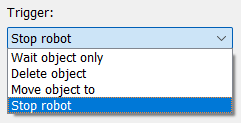
Les actions que vous pouvez effectuer lorsqu’un objet est en contact avec le capteur sont les suivantes :
Arrêter un robot : vous devez sélectionner le robot ou le mécanisme qui doit s’arrêter.
Supprimer un objet : l’objet doit être retiré de la station.
Attendre uniquement l’objet (par exemple, vous pouvez déclencher la prise d’un objet par un robot).
Déplacer un objet vers un autre système de coordonnées. Par exemple, pour transférer un objet d’un convoyeur à un autre.