Test ballbar
Cette section décrit les étapes à suivre pour effectuer les mesures de la ballbar.
Il est nécessaire d’avoir 2 programmes robot :
●BallbarSetup : ce programme permet de régler le centre du test du ballbar au même endroit où vous avez enregistré les articulations/joints du robot.
●BallbarTest: ce programme représente le parcours circulaire autour du centre toolcup de façon à faire l’acquisition de mesure avec le ballbar.
Pour s’assurer que le centre toolcup est à la bonne position, exécuter le programme Ballbarsetup. Le robot se déplacera vers le point central avec une approche linéaire. Puis placer et verrouiller le support magnétique.
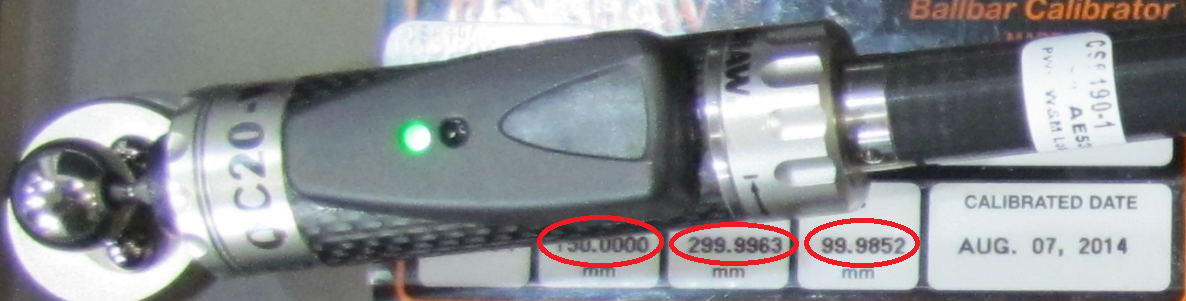
Bien s’ assurer que vous avez saisi les paramètres de calibration du kit de bille (voir l’image suivante). Ces valeurs doivent être rentrées dans les cases “Distance de référence de ballbar ...” du menu des paramètres de test. La barre à bille sera alors capable de mesurer ces distances de plus ou moins 1 mm avec un micromètre de précision. La précision est suffisante pour les robots industriels, mais la plage de mesure peut être limitée dans certains cas.
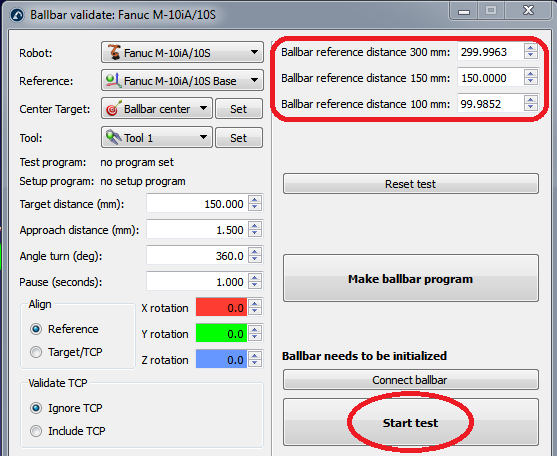
Commencer le test en sélectionnant « Démarrer essai » (il n’est pas nécessaire de sélectionner au préalable « Connecter avec ballbar »). Une nouvelle fenêtre s’affiche pour afficher l’état de la connexion avec le ballbar. Si le ballbar n’a pas été détecté ou s’il y a des problèmes, fermer la fenêtre de connexion du ballbar, désactiver le périphérique, le réactiver et réessayer pour démarrer le test. Si le problème persiste, bien s’assurer d’avoir une connexion Bluetooth appropriée.
Une fois que la connexion Bluetooth a été établie, RoboDK guidera l’utilisateur avec les étapes suivantes :
1.Initialiser le ballbar avec la distance sélectionnée pour le test.
2.Placer le robot en position de départ (le programme s’interrompt avant de continuer)
3.Placer ensuite le ballbar dans le robot.
4.Commencer le test en sélectionnant OK sur l’écran de l’ordinateur. Le robot ne bougera pas tant que vous n’aurez pas choisi de continuer sur le teach pendant du robot.
5.Si tout est correct, une nouvelle fenêtre s’ouvre pour afficher la mesure courante du Ballbar.
6.Continuer avec le programme du robot pour suivre la trajectoire.
7.Lorsque le robot a terminé le mouvement, arrêter les mesures (dans le sens horaire et antihoraire).
Lorsque le test est terminé, RoboDK affichera le résultat du test et demandera à l’utilisateur d’enregistrer un rapport en format PDF.
L’étape 4 est importante pour détecter le début et la fin du test. Ces limites sont détectées car le robot effectue un mouvement radial d’environ 1,5 mm pour déclencher le début et la fin des mesures (aux points de départ et d’arrivées du parcours).