Configuration hors ligne
Il est recommandé de construire un environnement virtuel de la configuration réelle dans RoboDK (configuration hors ligne) pour préparer le parcours et les positions pour les tests. Cela peut être fait avant d’avoir le robot et le tracker, seulement en utilisant un ordinateur avec RoboDK installé dessus. Les exemples d’étalonnage RoboDK et de configuration de validation de parcours peuvent être téléchargés à partir du lien :
https://www.robodk.com/downloads/calibration/
RoboDK a un utilitaire pour générer les configurations et le parcours recommandé comme indiqué par la norme ISO9283. Pour utiliser cet utilitaire :
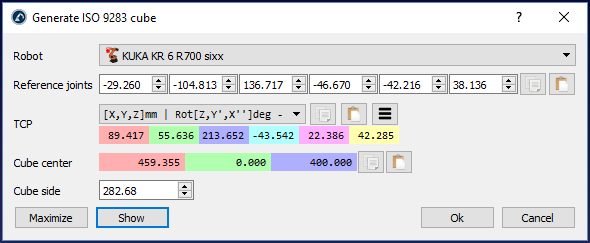
1.Utilitaires➔Créer cube ISO 9283 (cibles et parcours)
2.Entrer les joints de référence (position du robot où l’outil fait face au tracker)
3.Ajuster la position et dimension du cube
4.Sélectionner OK
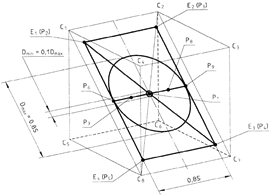
Cela créera les 5 cibles décrites dans la norme ISO ainsi que le parcours recommandé pour les tests de précision de trajectoires. Ces cibles et parcours restent à l’intérieur d’un cube situé devant le robot. Nous pouvons définir le côté souhaité du cube ainsi que de déplacer le centre (cible « ISO p1 ») et les joints de référence qui définiront l’orientation du parcours. Il est également possible de maximiser la taille du cube pour trouver le plus grand cube qui s’inscrit dans l’espace de travail du robot.
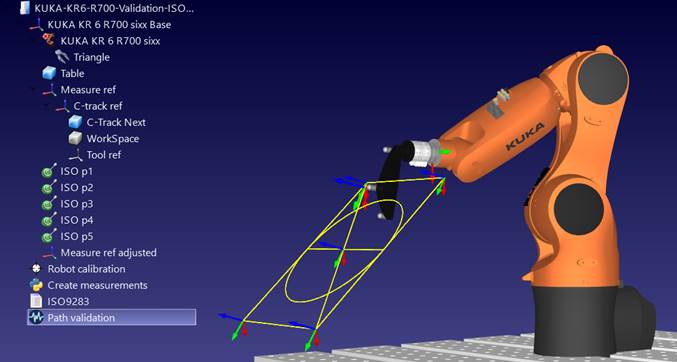
Une station exemple avec étalonnage robot et options de validation robot est montré dans l’image suivante.