Introduction
La norme ISO « ISO9283 : Robots manipulateurs industriels - Critères de performance et méthodes d’essai correspondantes » décrit les essais visant à évaluer la performance des robots industriels. Entre autres, elle fournit des procédures pour mesurer correctement la précision de la position du robot, la répétabilité et la précision de trajectoire.
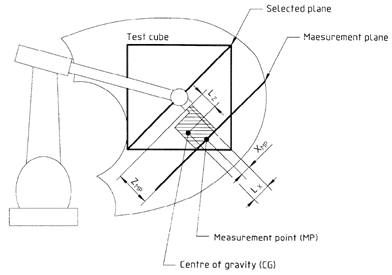
Selon la norme ISO9283, tous les essais doivent être effectués à l’intérieur du cube de test ISO. Le cube de test ISO est censé être le plus grand cube pouvant s’insérer dans l’espace de travail du robot. De plus, la précision et la répétabilité de la position doivent être mesurées 30 fois dans cinq configurations différentes. Il est bien connu que 5 configurations ne suffisent pas à fournir une mesure appropriée de la précision pour les robots modernes.
La plupart des fabricants de robots ne fournissent une précision de positionnement de robot que si le robot a été étalonné. Ils utilisent au moins 100 configurations différentes pour fournir des statistiques de précision de position appropriées. Les robots industriels sont très reproductibles mais manque souvent de précision ; par conséquent, la précision d’un robot industriel peut être améliorée grâce à l’étalonnage.
Espace de travail typique du robot dans les années 80 Espace de travail typique d’un robot moderne
Cependant, la norme ISO9283 est souvent utilisée pour les tests de répétabilité et de précision de trajectoire, même si le robot n’a pas été étalonné.

Il est recommandé de regarder la vidéo suivante montrant les tests de précision de parcours avec RoboDK : https://youtu.be/yMQjqAQY1iE.
RoboDK peut également être utilisé pour calibrer les robots ainsi que pour tester leurs performances avant et après l’étalonnage. Enfin, RoboDK peut également être utilisé pour tester la précision du robot avant et après l’étalonnage grâce à des tests à bille ballbar.