Précision et répétabilité de la position
La même procédure est utilisée pour la validation de la précision de la position pendant l’étalonnage du robot peut également être utilisée pour le contrôle de la précision de la position. Des statistiques de répétition peuvent également être obtenues si les mesures sont prises de façon séquentielle dans le même groupe de points. La seule différence entre effectuer uniquement la validation ou l’étalonnage et la validation est que la première option ne nécessite pas de licence d’étalonnage de robot.
Pour effectuer ces validations, sélectionner le menu :
●Utilitaires➔Test de précision & répétabilité (ISO 9283)
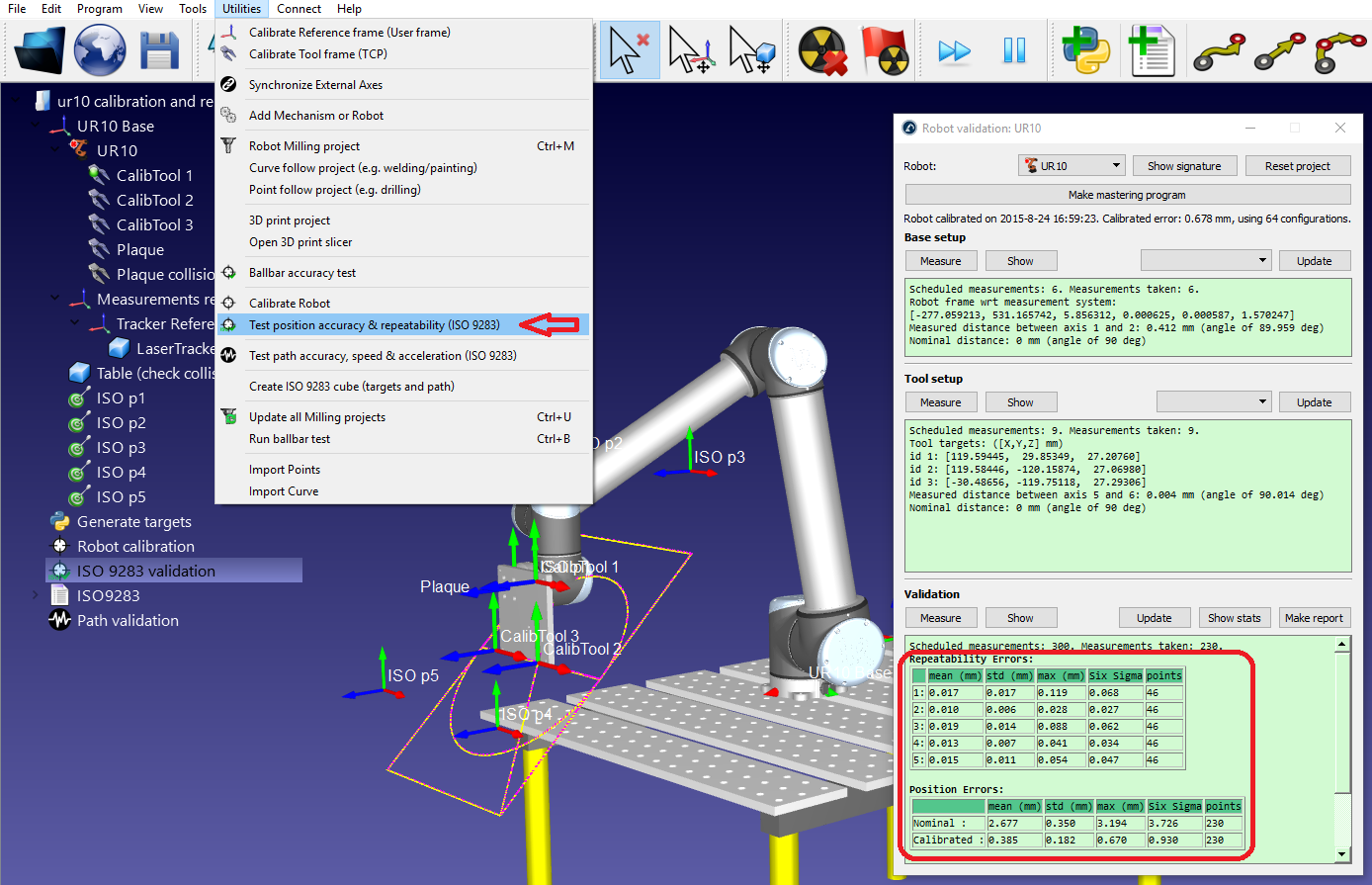
Ces tests nécessitent d’identifier le repère de base du robot par rapport au repère de référence des mesures (configuration de base) et également le repère d’outils par rapport à la bride du robot (configuration de l’outil).
Il est possible d’obtenir un rapport PDF lorsque les tests de précision de position et de répétabilité sont terminés.