Précision de trajectoire
Pour effectuer des tests de précision de trajectoire, il est nécessaire d’avoir un programme de robot créé avec RoboDK, comme le programme ISO9283 créé par l’utilitaire Créer cube ISO 9283. Il est possible de générer le programme de robot spécifique du fournisseur en sélectionnant le programme et en appuyant sur F6 (ou en sélectionnant Programme➔Générer programme). Il est aussi possible d’utiliser tout autre programme créé dans RoboDK (comme une ligne droite, un cercle ou un carré).
Il est également nécessaire d’avoir un système de mesure qui peut suivre la position du bout de l’effecteur et fournir les mesures de position par rapport à un repère de référence. Il est nécessaire d’utiliser les procédures de configuration de base et de configuration des outils dans RoboDK (nécessaires pour effectuer des tests d’étalonnage ou de précision de position) pour identifier le repère de base du robot et le repère de l’outil.
Les données de mesure doivent être acquises lors du déplacement du robot le long du programme. Les mesures doivent être enregistrées en continu à l’aide du logiciel par défaut fourni par le fabricant du système de mesure. Il est nécessaire d’exporter les mesures sous forme de fichier CSV ou TXT. Ces fichiers doivent contenir les données de position XYZ ainsi que l’horodatage de chaque mesure. En option, ces mesures peuvent contenir l’orientation de l’outil par rapport à la base du robot.
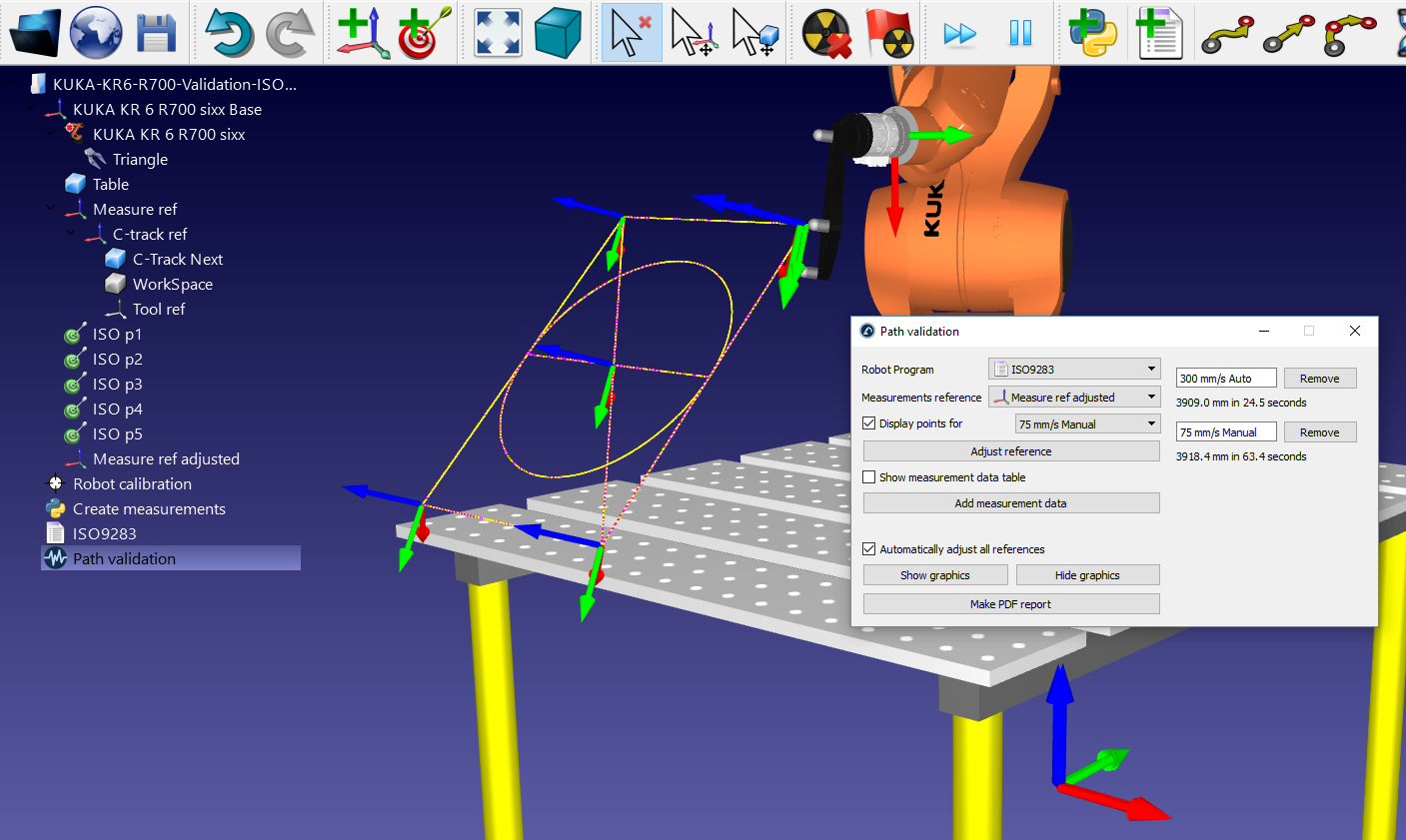
Pour lancer un projet de validation de parcours dans RoboDK :
1.Sélectionner Utilitaires➔Test de précision, vitesse et accélération (ISO 9283)
2.Sélectionner le programme utilisé pour la validation depuis le menu déroulant
3.Définir le repère de référence utilisé pour les mesures
4.Importer les données de mesure en sélectionnant Ajouter des données de mesure. Il est aussi possible de glisser-déposer les fichiers CSV ou TXT contenant les mesures dans la fenêtre de validation de trajectoire.
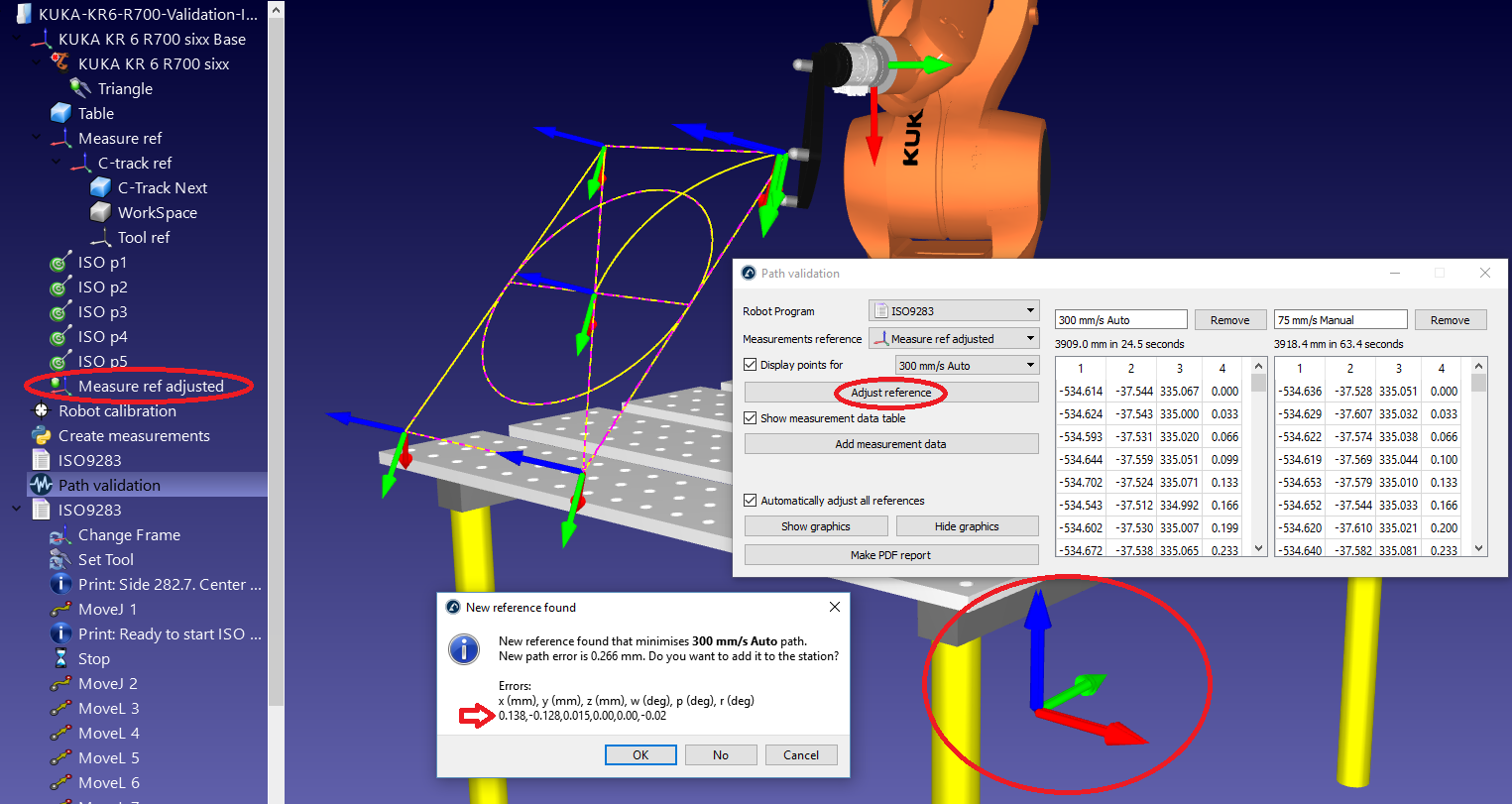
Enfin, sélectionner Faire un rapport PDF pour générer un PDF avec quelques statistiques et graphiques sur la précision de la trajectoire, la vitesse et l’accélération. Il est possible d’exécuter le même test plus d’une fois dans des conditions différentes (vitesses différentes, valeurs d’arrondi/virage différentes, charges utiles différentes, …) pour comparer ces paramètres dans le même rapport.
Les points de mesure peuvent être affichés en violet. Ces mesures doivent correspondre au parcours jaune qui décrit le parcours idéal que le robot doit suivre. Les statistiques définies par RoboDK sont les différences entre ces deux parcours.
Si le repère de référence n’a pas été correctement défini, les points de mesure ne correspondent pas au parcours jaune. Cela peut se produire pour plusieurs raisons, comme une mauvaise définition du repère de référence ou une définition d’outil différente. Dans ce cas, en sélectionnant Ajuster la référence, on essaiera d’adapter au mieux les deux parcours afin que les statistiques fournies isolent ces désalignements.