Résultats
Une fois le test de précision du parcours terminé, il est possible d’obtenir un rapport PDF en sélectionnant Faire un rapport PDF dans la fenêtre de validation du parcours. Cela générera un PDF avec quelques statistiques et graphiques sur la précision du parcours, la vitesse et l’accélération.
Les résultats du test d’exemple préparé dans les sections précédentes sont présentés dans les images suivantes. Dans cet exemple, le programme ISO9283 a été exécuté dans deux modes différents :
●Mode manuel à une vitesse de 75 mm/s
●Mode automatique à une vitesse de 300 mm/s
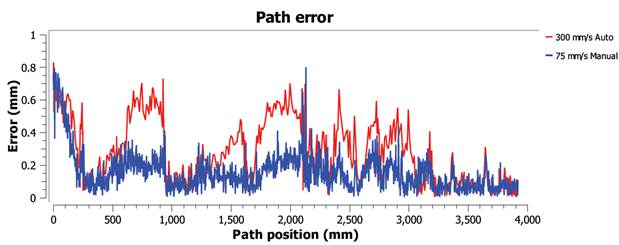
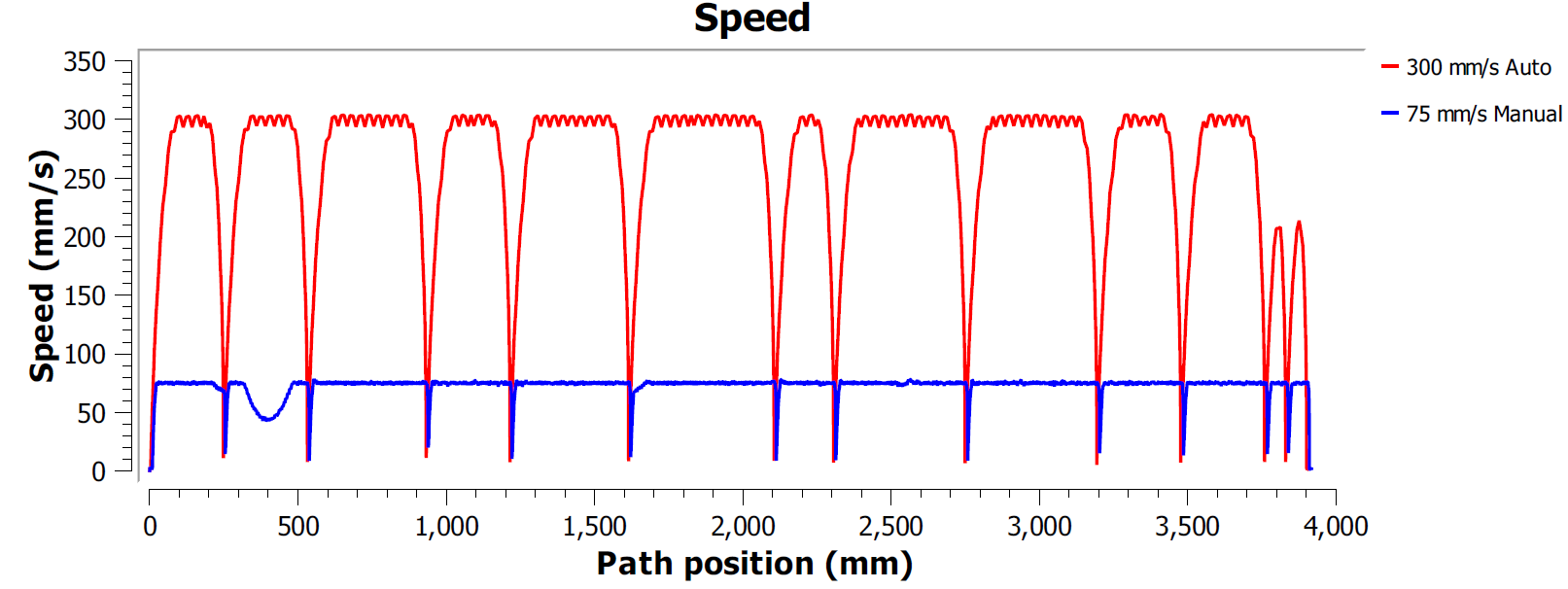
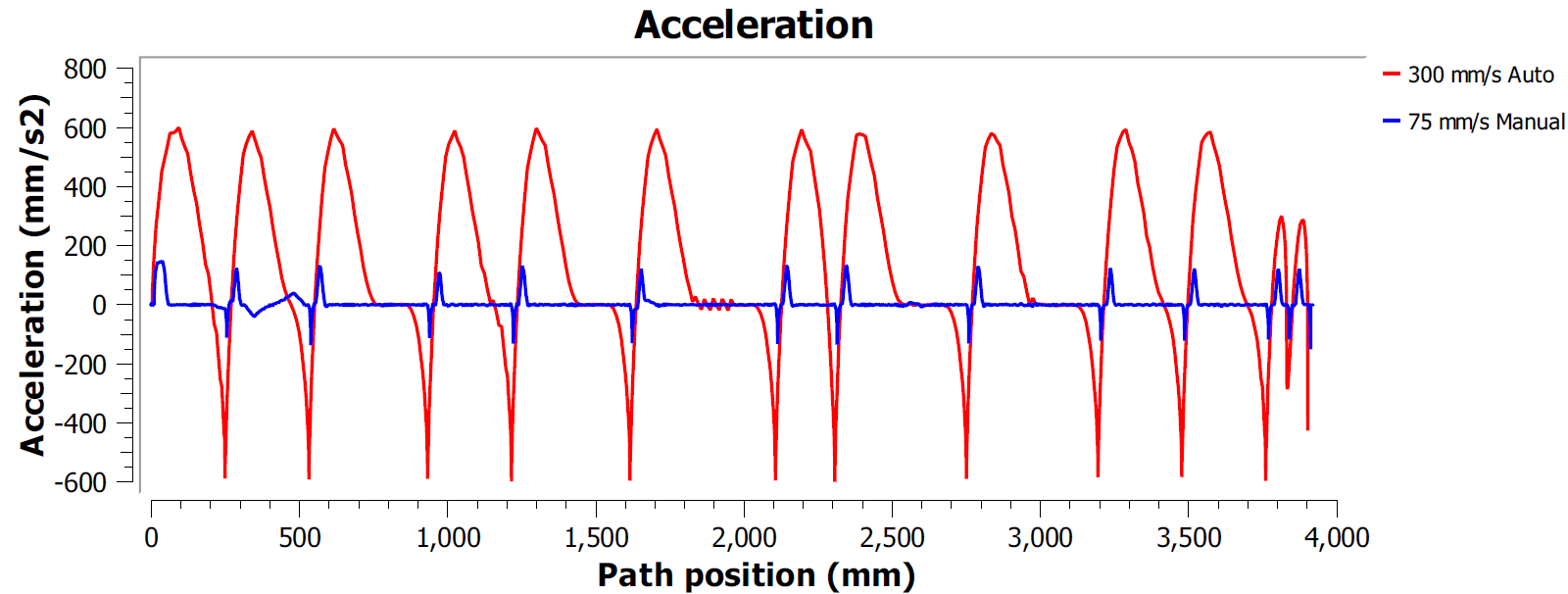
Dans cet exemple, les deux programmes ont été générés à l’aide de l’option précision fine. Cela signifie que le robot s’arrêtera à chaque point pour rendre le parcours aussi précis que possible. Dans ce cas, il est typique d’observer des accélérations et des décélérations élevées le long de la trajectoire parce que la vitesse doit être nulle à la fin de chaque mouvement de ligne ou de cercle (coins).
La plupart des marques de robots offrent des options d’arrondi pour éviter cet effet en lissant les bords. Par exemple, ABB l’appelle ZoneData et permet de spécifier une zone de précision où le contrôleur est autorisé à lisser les bords, Fanuc l’appelle CNT et permet de spécifier un pourcentage de lissage proportionnel à la vitesse, L’option KUKA offre l’instruction $ADVANCE avec le drapeau C_DIS et Universal Robots permet de spécifier un rayon pour lisser les bords.
Par conséquent, le test de précision du parcours permet de trouver un bon compromis entre le maintien d’une vitesse fluide tout en maintenant des niveaux de précision acceptables autour du parcours théorique.
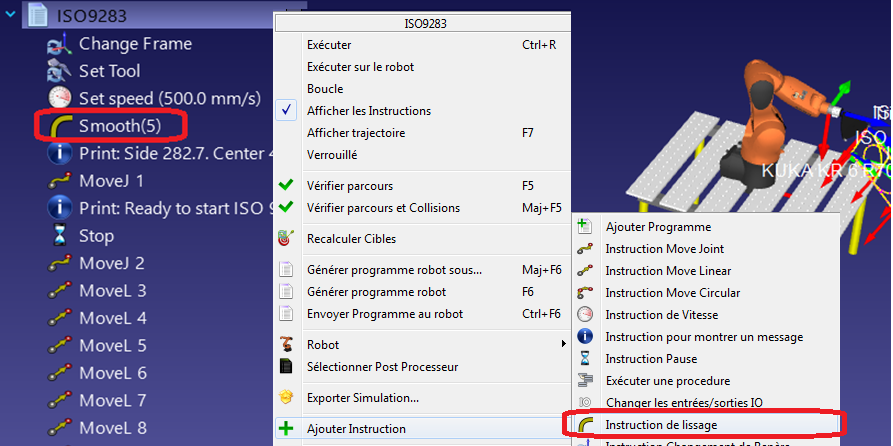
Il est possible de spécifier le paramètre d’arrondissement dans RoboDK ainsi que la vitesse du programme. Pour éditer un programme pour un tel test :
1.Faire un clic droit sur le programme
2.Sélectionner Afficher Instructions
3.Sélectionner la première ou seconde instruction
4.Sélectionner Programme➔ Instruction de lissage afin de spécifier une précision d’arrondissement
5.Sélectionner Programme➔ Instruction de vitesse afin d’indiquer la vitesse