Récupérer le TCP
Les étapes suivantes permettent de créer ou de modifier des outils de robot (TCP, également connu sous le nom de données d’outils dans la programmation de robot ABB) :
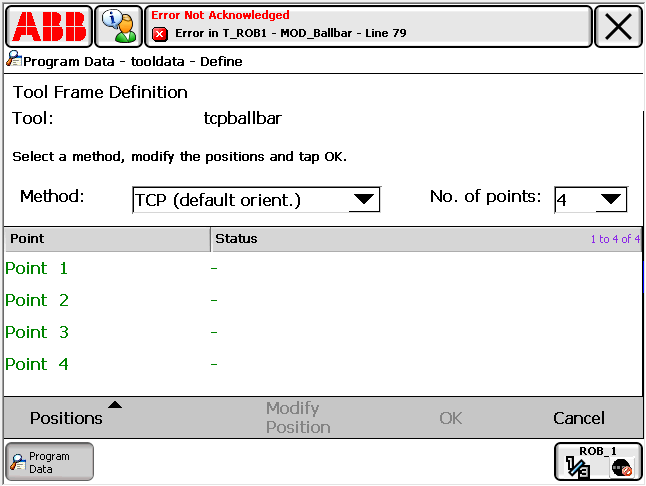
1.Sélectionner ABB➔Program data➔tooldata (double-cliquer)
2.Il est possible de créer ou de modifier des variables d’outils existantes
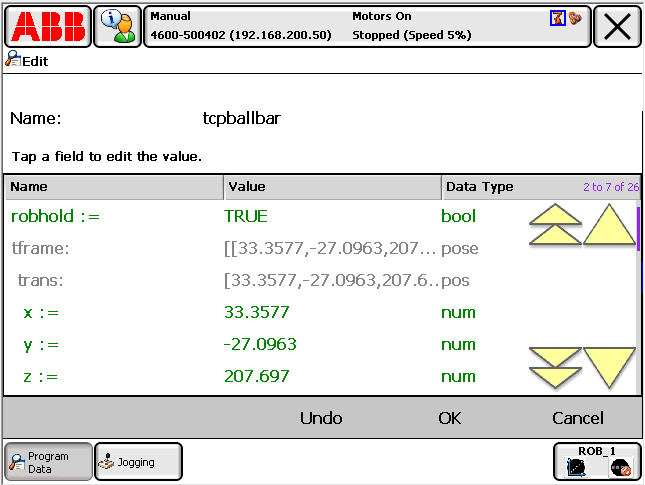
3.Une fois l’outil défini, les valeurs X, Y, Z du TCP peuvent être récupérées