Transférer les programmes par le FTP
Les programmes peuvent être facilement transférés via FTP depuis RoboDK pour les robots ABB :
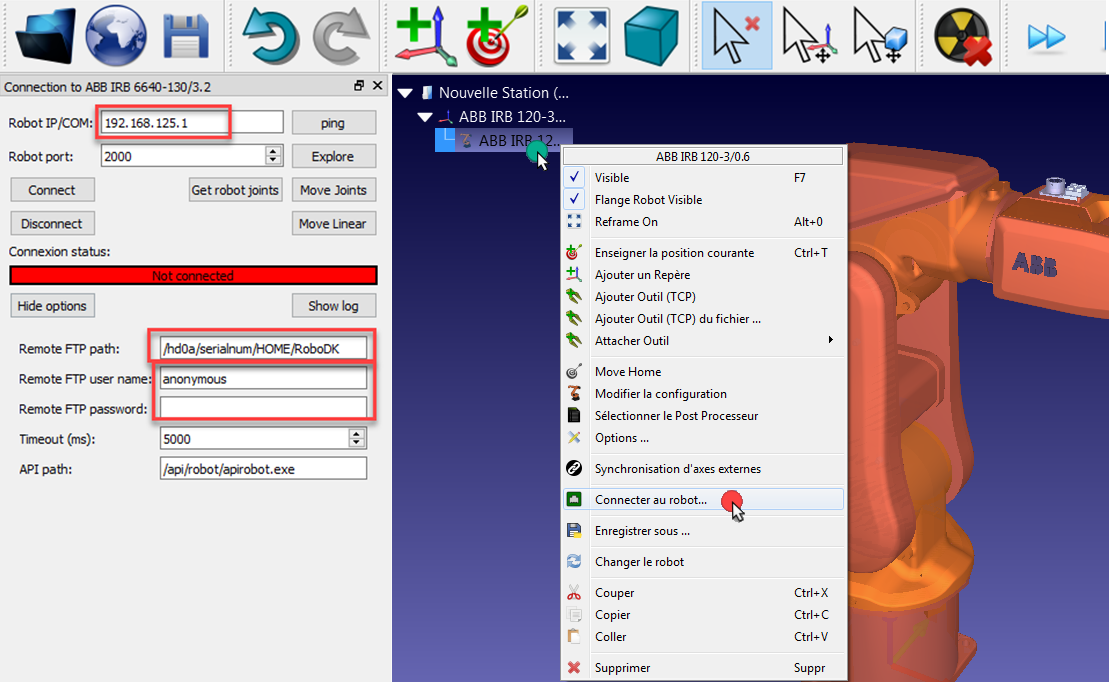
1.Faire un clic droit sur le robot dans RoboDK
2.Sélectionner Connecter au Robot…
3.Entrer l’adresse IP du robot
4.Entrer le chemin FTP.
Le chemin complet peut être récupéré à partir du teach pendant ou en utilisant Filezilla FTP Client.
5.Entrer les informations d’authentification du FTP (par défaut anonymous)
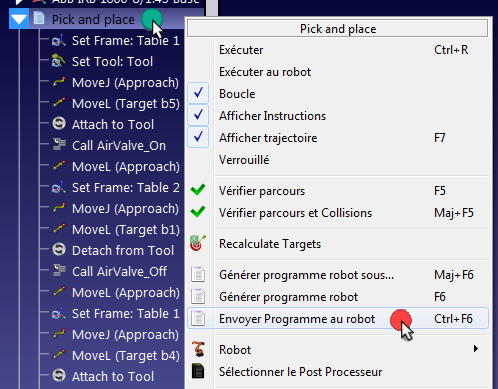
Une fois qu’un programme RoboDK est prêt à être envoyé au robot :
1.Faire un clic droit sur un programme dans RoboDK
2.Sélectionner Envoyer programme au robot (Ctrl+F6)
Cela générera le programme et tentera de le transférer au contrôleur robot. Une fenêtre apparaîtra si le transfert FTP a réussi ou non.
Lorsque les programmes sont transférés par FTP à la volée, ils doivent être chargés en utilisant la programmation RAPID côté robot. L’exemple suivant exécutera le programme main_RoboDK à partir d’un module appelé Mod_pick_and_place:
MODULE RoboDK_FTP_Run_Program
! Enter the path to a folder with write access rights. Example:
CONST string PATH_ROBODK := "/hd0a/robot-serial-num/HOME/RoboDK";
PERS string ftp_program_loaded := ";
PROC Main()
FTP_Run_Program;
ENDPROC
PROC FTP_Run_Program()
var num module_id := -1;
WHILE module_id <= 0 DO
TPErase;
TPReadNum module_id, "Enter the program to run. For example: to run Prog2 in Module Prog2.mod type 2.";
ENDWHILE
FTP_Run_Program_ID(module_id);
ENDPROC
PROC FTP_Run_Program_ID(num module_id)
VAR string path_module := "";
VAR string mod_to_unload;
IF module_id <= 0 THEN
RETURN;
ENDIF
path_module := PATH_ROBODK + "/Prog" + NumToStr(module_id, 0) + ".mod";
IF StrLen(ftp_program_loaded) > 0 THEN
mod_to_unload := ftp_program_loaded;
ftp_program_loaded := "";
UnLoad mod_to_unload;
ENDIF
Load path_module;
ftp_program_loaded := path_module;
TPWrite "Starting program: " + path_module;
! call the main program from the module sent and loaded
! %"main_RoboDK"%;
! call the numbered program (it should have the same effect)
%"Prog"+NumToStr(module_id,0)%;
TPWrite "Program completed";
ENDPROC
ENDMODULE