Post processeur
Cette section présente quelques conseils relatifs à la création de programmes pour les robots Brooks.
Point central de l'outil (CDO)
Le point central de l'outil (CDO) dans RoboDK et dans le contrôleur doit correspondre. Si vous utilisez un mécanisme de préhension, il est nécessaire d'ajouter un CDO à l'aide de "Add-in (CDO)" qui se trouve à la position prévue. Le nouveau CDO de l'outil doit correspondre au CDO du mécanisme de préhension. Les informations relatives au point central de l'outil (CDO) des robots PreciseFlex de Brooks peuvent être trouvées en allant sur l'interface Web et en suivant les étapes suivantes :
1.Administrateur
2.Setup - Base de données des paramètres
3.Robot
4.Contrôle conjoint/cartésien
5.Paramètres dynamiques
6.DataID 16051
Grippeur
Voir la section précédente Simulation de la pince pour savoir comment définir correctement les instructions de la pince compatibles avec le post-processeur. Cette approche permet de définir correctement les emplacements dans le projet GPL, en évitant les mouvements inattendus de l'axe ou des axes de la pince.
Arrondi
Une valeur d'entrée de -1 détermine que le robot s'arrêtera à la fin du mouvement et qu'une contrainte d'erreur de position stricte sera appliquée (code GPL : prof1.InRange = 100).
Une valeur d'entrée de 0 détermine que le robot s'arrêtera à la fin du mouvement, mais qu'une petite contrainte d'erreur de position sera appliquée (code GPL : prof1.InRange = 10).
Une valeur d'entrée supérieure à 0 détermine que le robot ne s'arrêtera pas à la fin du mouvement et qu'un mouvement mixte sera exécuté (code GPL : prof1.InRange = -1).
Vitesse et accélération
Les informations relatives aux vitesses/accélérations linéaires, angulaires et articulaires maximales des robots Brooks PreciseFlex peuvent être obtenues en allant sur l'interface Web et en suivant les étapes suivantes :
1.Administrateur
2.Setup - Base de données des paramètres
3.Robot
4.Contrôle conjoint/cartésien
5.Paramètres dynamiques
6.DataIDs 2700, 2701, 2702, et 2703
L'utilisateur peut définir les entrées des instructions de vitesse/accélération de RoboDK en utilisant les valeurs des DataID ci-dessus comme références. Le post-processeur Precise utilisera ensuite ces valeurs pour calculer la vitesse/accélération en pourcentage de la vitesse/accélération maximale pour chaque robot, comme le demande la classe de profil GPL.
Pour modifier les limites utilisées par le postprocesseur, vous pouvez modifier le postprocesseur en fonction du robot spécifique que vous utilisez. Par défaut, le postprocesseur utilise les limites des robots PF400 et PF3400. Reportez-vous à la section https://robodk.com/doc/en/Post-Processors.html#PPEditor de la documentation pour modifier le postprocesseur.
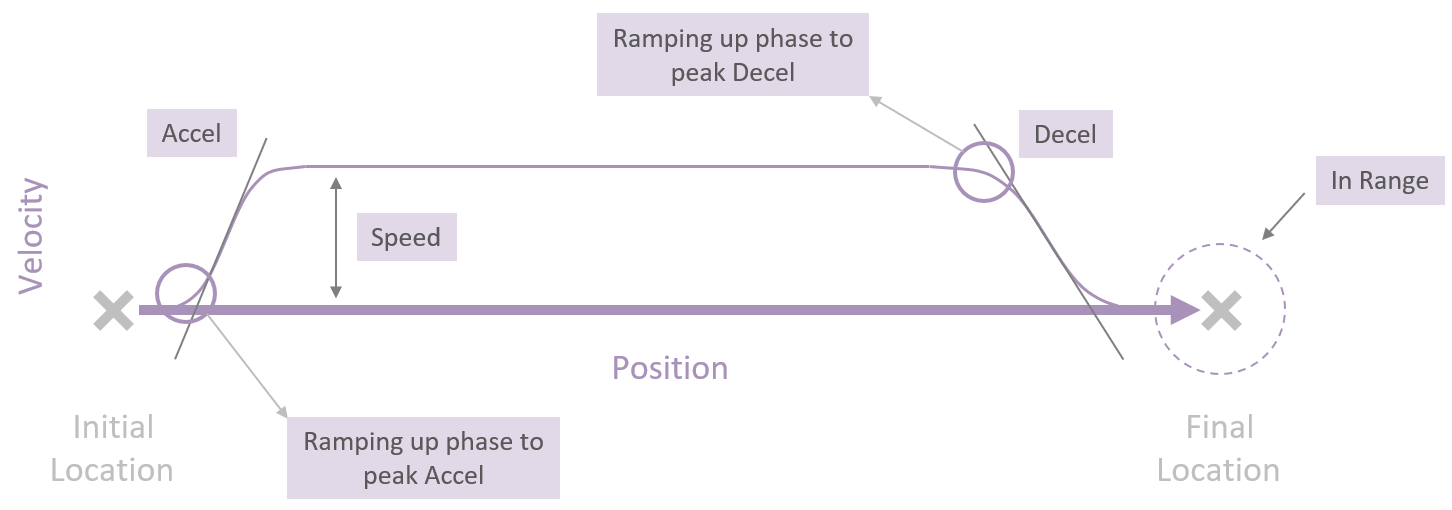
Si des valeurs d'entrée inférieures à 1 sont utilisées avec les instructions d'accélération linéaire et angulaire, ces entrées seront utilisées comme la durée en secondes de l'accélération/décélération maximale (code GPL : prof1.AccelRamp/prof1.DecelRamp = valeur d'entrée).
L'image ci-dessous donne plus d'informations sur les concepts décrits ci-dessus et sur la manière dont le contrôleur planifie les trajectoires que le robot doit suivre.
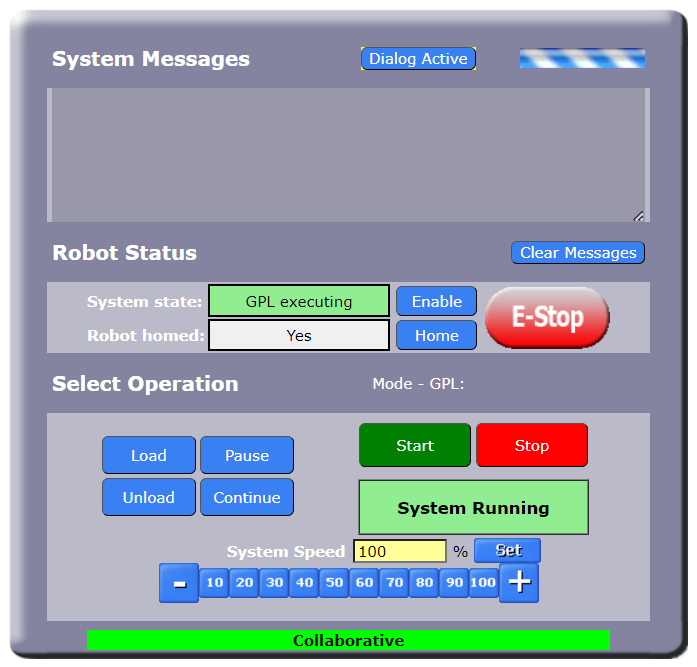
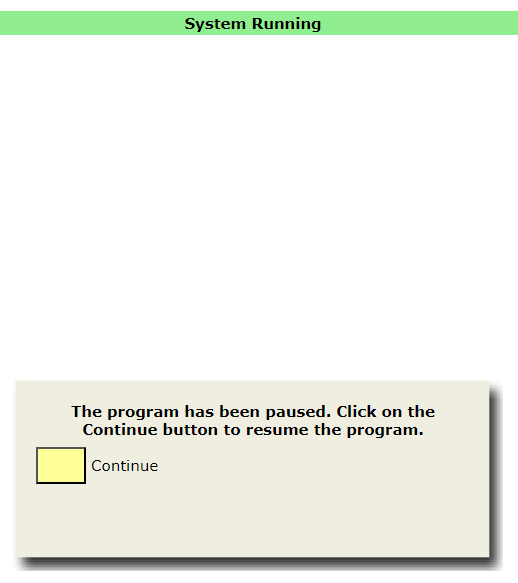
Pause
La définition d'une valeur d'entrée supérieure à 0 génère une commande GPL qui interrompt le programme pendant la durée définie par la valeur d'entrée. Une valeur d'entrée négative ouvrira une boîte de dialogue contextuelle sur le panneau de contrôle de l'opérateur de l'interface Web et le programme sera interrompu jusqu'à ce que l'utilisateur clique sur le bouton "Continuer" de la boîte de dialogue. Pour visualiser la boîte de dialogue, l'utilisateur doit cliquer sur le bouton "Boîte de dialogue active" du panneau de contrôle de l'opérateur.