Rails linéaires
Comme le châssis du robot PreciseFlex n'est pas placé à la base physique du robot, des décalages spécifiques sont nécessaires entre les robots PreciseFlex et les rails linéaires PreciseFlex.
Configuration du rail linéaire PreciseFlex de Brooks :
a.Brooks PreciseFlex 400 : [118, 0, 45.6, 0, 0, 0]
b.Brooks PreciseFlex 3400 : [118, 0, 62.6, 0, 0, 0]
Rail linéaire PreciseFlex de Brooks - configuration à 90 degrés :
a.Brooks PreciseFlex 400 : [101.6, 0, 45.6, 0, 0, 0]
b.Brooks PreciseFlex 3400 : [101.6, 0, 62.6, 0, 0, 0]
Le rail linéaire doit être synchronisé pour que le postprocesseur prenne en compte la position de l'axe. Reportez-vous à la section https://robodk.com/doc/en/General.html#SyncAxes pour plus d'informations.
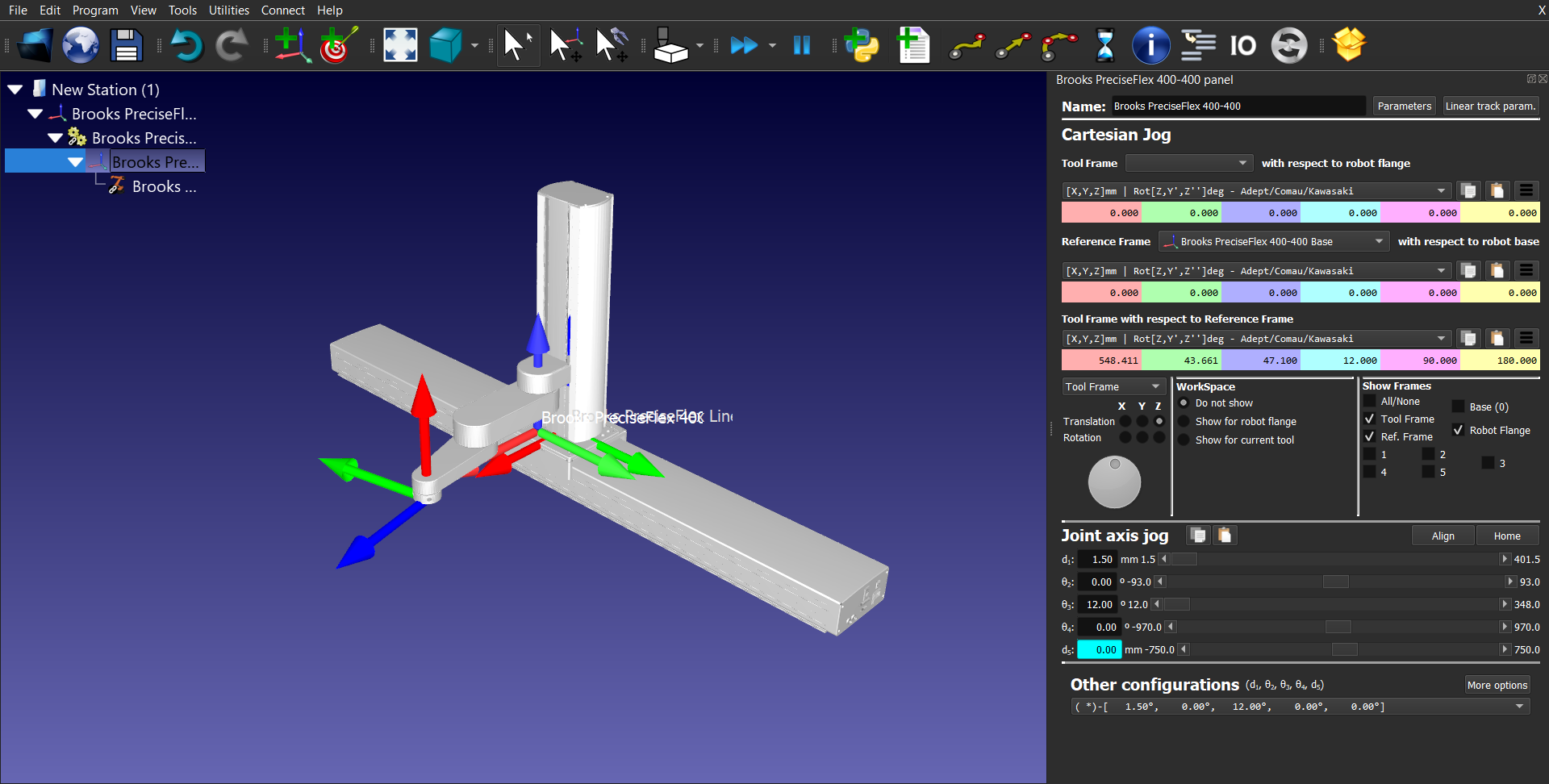
Pour enregistrer correctement les cibles dans le Système de Référence Mondial du robot et les utiliser ultérieurement dans un projet GPL créé à l'aide du postprocesseur, l'utilisateur doit définir un nouveau système de référence. Celui-ci doit être défini par rapport au système de référence de la station, avec les mêmes décalages utilisés précédemment entre la base du robot et le rail linéaire (comme indiqué ci-dessus). Les cibles doivent être définies par rapport à ce système de référence.
L'image ci-dessous montre un robot PreciseFlex 400 monté sur un rail linéaire de 1 m (en configuration à 0 degré) et le système de référence défini comme le Système de Référence Mondial du robot.
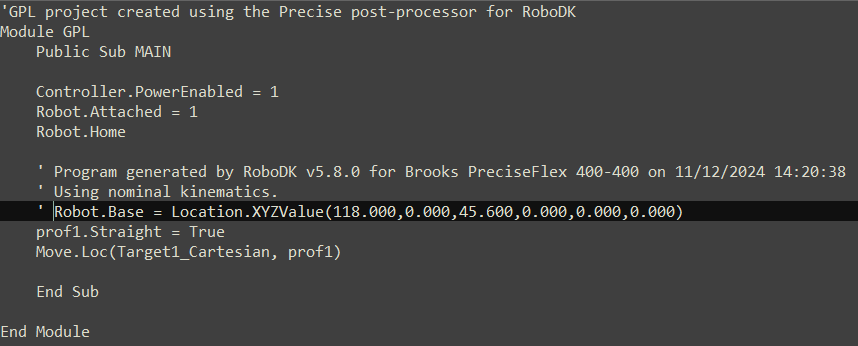
Après avoir généré le projet GPL, ouvrez le fichier Main.gpl avec un éditeur de texte quelconque et mettez en commentaire la ligne où le système de référence de base du robot est défini :