Vitesse et accélération
Les informations relatives aux vitesses/accélérations linéaires, angulaires et articulaires maximales des robots Brooks PreciseFlex peuvent être obtenues en allant sur l'interface Web et en suivant les étapes suivantes :
1.Administrateur
2.Setup - Base de données des paramètres
3.Robot
4.Contrôle conjoint/cartésien
5.Paramètres dynamiques
6.DataIDs 2700, 2701, 2702, et 2703
L'utilisateur peut définir les entrées des instructions de vitesse/accélération de RoboDK en utilisant les valeurs des DataID ci-dessus comme références. Le post-processeur Precise utilisera ensuite ces valeurs pour calculer la vitesse/accélération en pourcentage de la vitesse/accélération maximale pour chaque robot, comme le demande la classe de profil GPL.
Pour modifier les limites utilisées par le postprocesseur, vous pouvez modifier le postprocesseur en fonction du robot spécifique que vous utilisez. Par défaut, le postprocesseur utilise les limites des robots PF400 et PF3400. Reportez-vous à la section https://robodk.com/doc/en/Post-Processors.html#PPEditor de la documentation pour modifier le postprocesseur.
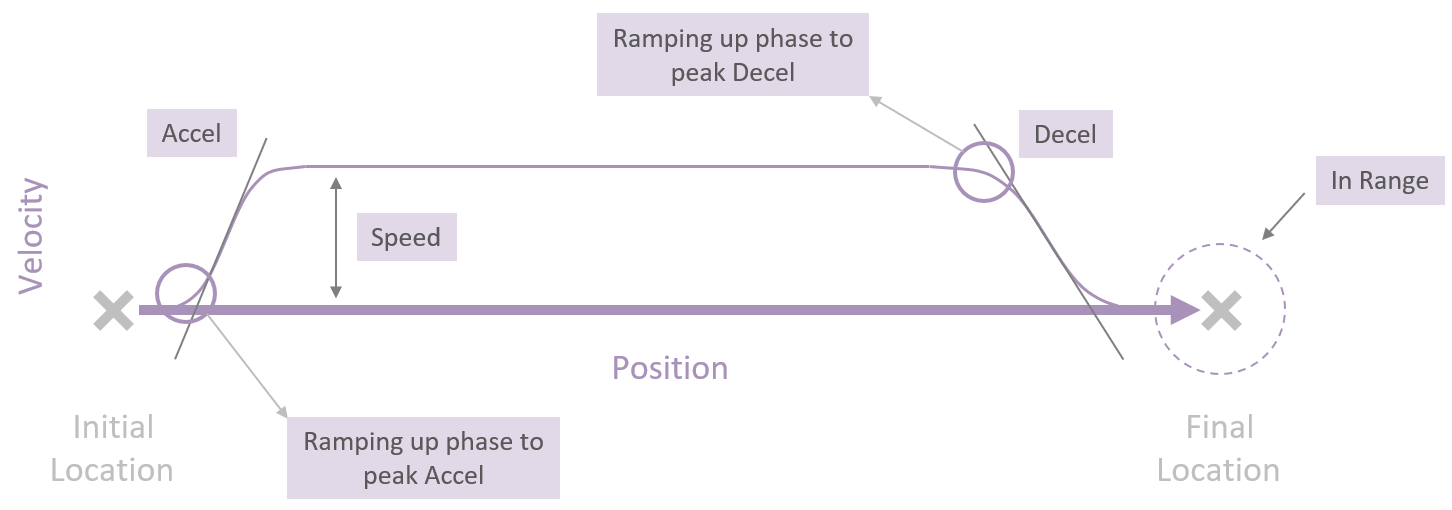
Si des valeurs d'entrée inférieures à 1 sont utilisées avec les instructions d'accélération linéaire et angulaire, ces entrées seront utilisées comme la durée en secondes de l'accélération/décélération maximale (code GPL : prof1.AccelRamp/prof1.DecelRamp = valeur d'entrée).
L'image ci-dessous donne plus d'informations sur les concepts décrits ci-dessus et sur la manière dont le contrôleur planifie les trajectoires que le robot doit suivre.