Robots Comau
Cette section de la documentation fournit une vue d'ensemble des opérations typiques lorsque vous utilisez un robot Comau, telles que la génération de programmes à partir de RoboDK et leur chargement dans le contrôleur de robot Comau.
Transférer un programme de robot
Cette section vous aidera à charger un programme dans le contrôleur du robot Comau.
Procédez comme suit pour charger un formulaire de programme via FTP dans la mémoire du programme.
1.Dans l'onglet connexion du robot, configurez correctement l'adresse IP. Si le nom d'utilisateur et le mot de passe FTP ne sont pas les valeurs par défaut, vous pouvez les configurer sous "plus d'options"
2.Lorsque vous souhaitez transférer un programme, il vous suffit de faire un clic droit sur le programme et de sélectionner "Envoyer au robot"
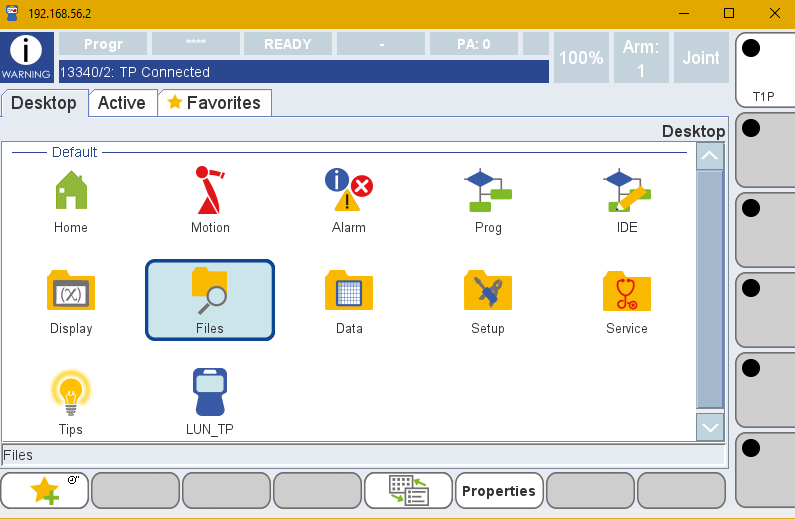
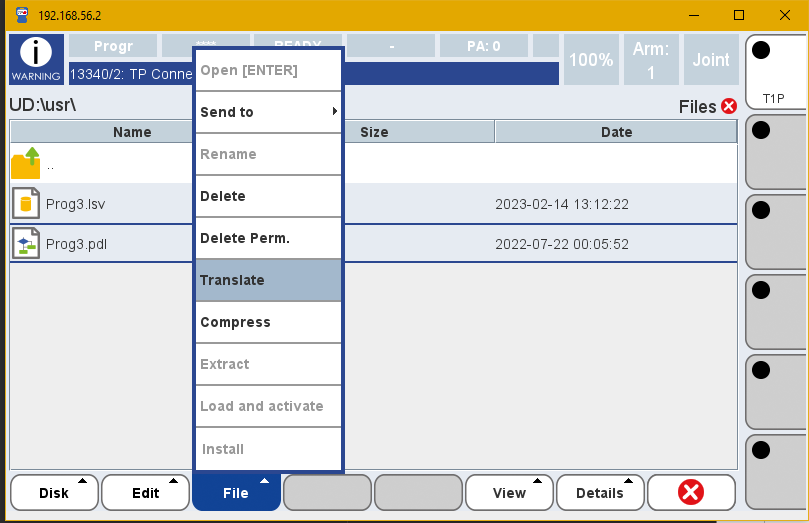
3.Sur le contrôleur du robot, naviguez jusqu'à "Fichiers" dans le menu principal des pendentifs d'apprentissage.
4.Sélectionnez le programme PDL et son LSV correspondant si nécessaire et cliquez sur Fichier->Traduire pour convertir le programme en sa version compilée correspondante.
5.Les fichiers compilés peuvent maintenant être chargés en mémoire et exécutés à l'aide de l'option "Prog" de l'interface principale.
Lorsque vous utilisez RoboDK avec un robot virtuel dans RoboShop, vous pouvez souhaiter augmenter le nombre maximal de connexions FTP simultanées, sinon le pendentif d'apprentissage virtuel se déconnecte à chaque fois que vous transférez un fichier. Pour ce faire, ouvrez un terminal sur le robot virtuel et effectuez les opérations suivantes.
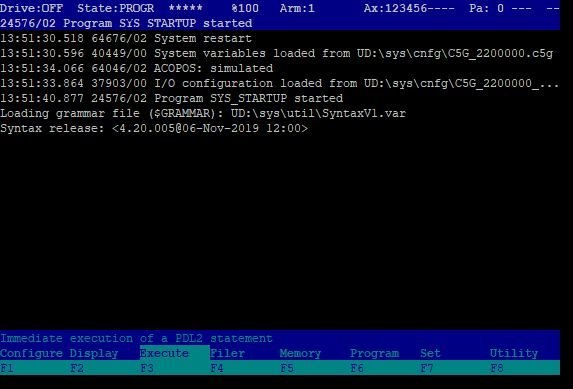
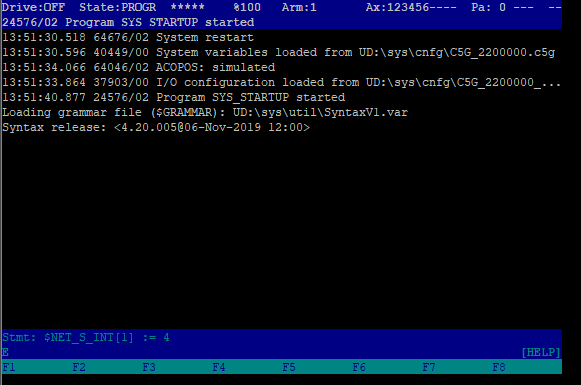
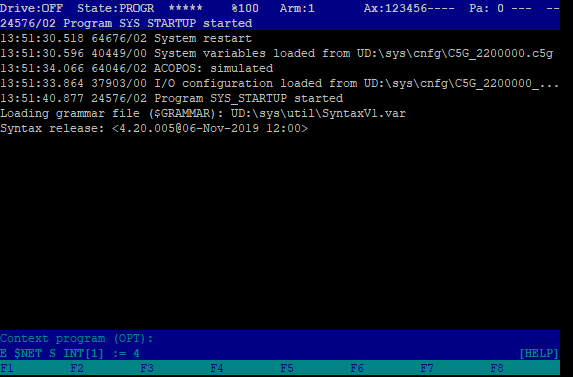
Naviguez jusqu'au terminal dans Roboshop et suivez les étapes suivantes à l'intérieur du terminal du robot :,
1.Sélectionnez Exécuter (F3)
2.Tapez "$NET_S_INT[1] := 4"
3.Appuyez sur "Enter" pour confirmer la déclaration
4.Appuyez une deuxième fois sur "Enter" pour exécuter la déclaration.
Post processeur
Lorsque vous générez des programmes pour les robots Comau, il est important de vérifier si votre robot est configuré pour des programmes MODAL ou NODAL.
Pour les programmes nodaux, sélectionnez les post-processeurs suivants en cliquant avec le bouton droit de la souris sur le robot, puis en cliquant sur le bouton "Sélectionner le post-processeur".
●Comau Nodal
Pour les programmes modaux, sélectionnez les post-processeurs suivants en cliquant avec le bouton droit de la souris sur le robot et en cliquant sur le bouton "Sélectionner un post-processeur", puis choisissez l'un des post-processeurs suivants :
●Comau C5G
●Comau C5G Joints
Pilote
Vous pouvez utiliser les fonctions de programmation en ligne avec les robots Comau. Pour que les fonctions de programmation en ligne fonctionnent, vous devez configurer le pilote du côté du contrôleur du robot Comau en exécutant le fichier de programme PDL du pilote.
Vous devez suivre ces instructions pour configurer le pilote Comau pour RoboDK :
1.Transférez le fichier RoboDKdriver.pdl vers le contrôleur de robot Comau.
2.Démarrer manuellement le programme sur le robot (convertit le robot en serveur).
3.Connectez-vous au robot à partir de RoboDK.
Le port de communication utilisé par défaut est 1102, mais vous pouvez le modifier dans le fichier RoboDKdriver.pdl.