Driver RoboDK pour Denso
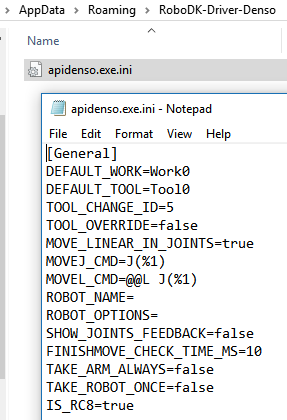
Le pilote RoboDK pour Denso peut être hautement personnalisé pour atteindre un comportement spécifique. Cette personnalisation peut être faite en éditant le fichier ini situé dans :
%APPDATA%/RoboDK-Driver-Denso/apidenso.exe.ini
Ces personnalisations permettent de spécifier le type de mouvements ou de pouvoir piloter plus d’un robot en même temps. Tout éditeur de texte peut être utilisé pour modifier ce fichier.
Les variables suivantes peuvent être configurées :
●DEFAULT_WORK – Objet de travail utilisé par défaut (variable string).
●DEFAULT_TOOL – Variable outil utilisée par défaut.
●TOOL_CHANGE_ID – Variable d’outil disponible à utiliser lorsqu’il est défini un nouvel outil (5=Outil5 par exemple).
●MOVE_LINEAR_IN_JOINTS – Défini à Faux pour définir des mouvements linéaires comme cibles cartésiennes.
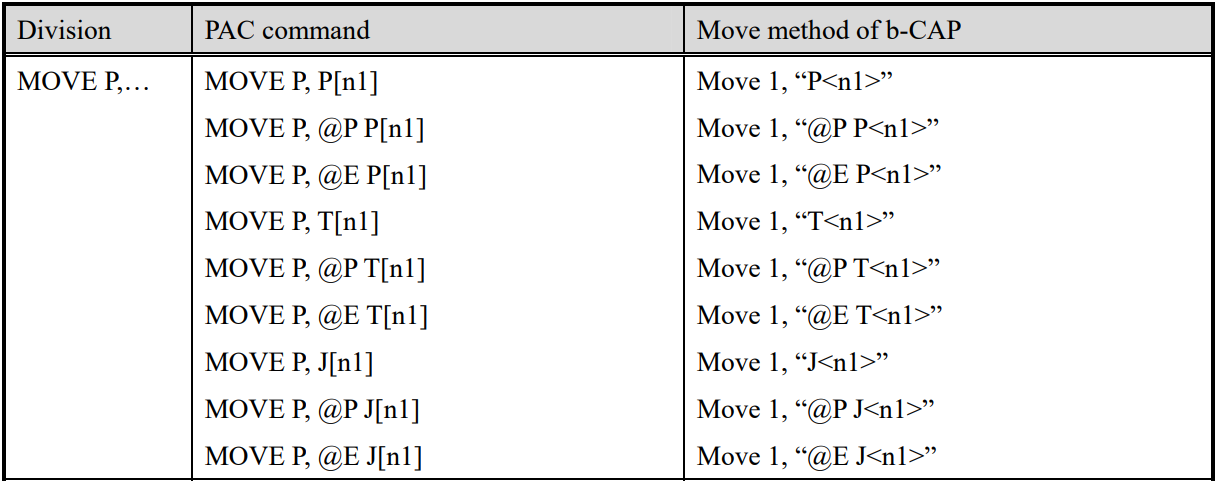
●MOVEJ_CMD – Commande pour envoyer un Mouvement Joint (MoveJ). Le tableau suivant définit les options disponibles :
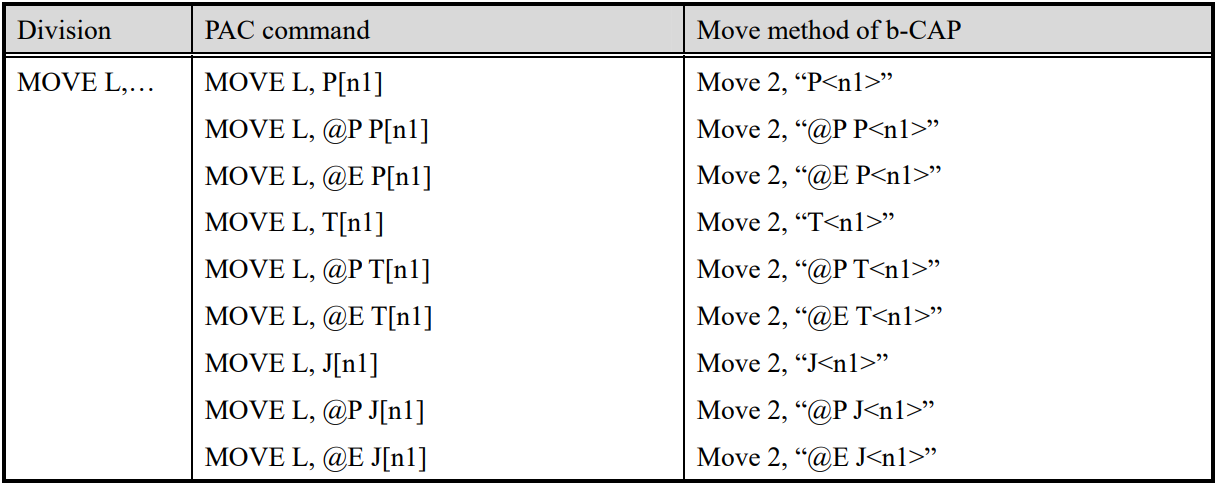
●MOVEL_CMD – Commande pour envoyer un Mouvement Linéaire (MoveL). Le tableau suivant définit les options disponibles :
●ROBOT_NAME – Nom du robot. Spécifie son nom afin de sélectionner un contrôleur robot spécifique.
●ROBOT_OPTIONS – Options de robot pour obtenir les ressources du robot. Par exemple, si vous utilisez le robot en esclave du contrôleur, spécifier ROBOT_OPTIONS=”ID=1”. L’ID doit être 0 (par défaut) si vous voulez utiliser le robot comme maître (robot principal)
●SHOW_JOINTS_FEEDBACK – Défini à Vrai pour voir l’information retour du robot sur l’écran en temps réel (la performance peut être plus lente).
●FINISH_MOVE_CHECK_MS – Défini la vitesse à laquelle la position du robot doit être rafraîchie à l’écran lors de l’affichage retour des articulations.
●TAKE_ARMS_ALWAYS – Défini à Vrai pour conserver les ressources du contrôleur après chaque mouvement jusqu’à ce que le robot soit déconnecté (plus rapide mais cela peut entraîner des résultats inattendus).
●TAKE_ROBOT_ONCE – Défini à Vrai pour garder la ressource du robot après chaque mouvement pendant que le robot est connecté (plus rapide mais il peut conduire à des résultats inattendus).
●IS_RC8 – Défini à Faux pour se connecter correctement aux contrôleurs RC7 et Denso plus anciens.