Driver RoboDK pour Fanuc
Les pilotes de robot fournissent une alternative à la programmation hors ligne (où un programme est généré, puis, transféré au robot et exécuté). Avec les pilotes de robot, il est possible d’exécuter une simulation directement sur le robot (programmation en ligne). Plus d’informations disponibles dans la section Robot Drivers.
Une connexion entre RoboDK et le robot Fanuc peut être établie pour déplacer le robot automatiquement à partir d’un PC connecté à l’aide de RoboDK. Cela permet d’utiliser l’option Exécuter sur Robot pour la programmation et le débogage en ligne. La connexion peut être établie via une connexion Ethernet standard (TCP/IP).
Suivre ces étapes pour paramétrer le driver RoboDK pour Fanuc :
1.Télécharger le driver Fanuc program fileset transférer le programme robot suivant au contrôleur :
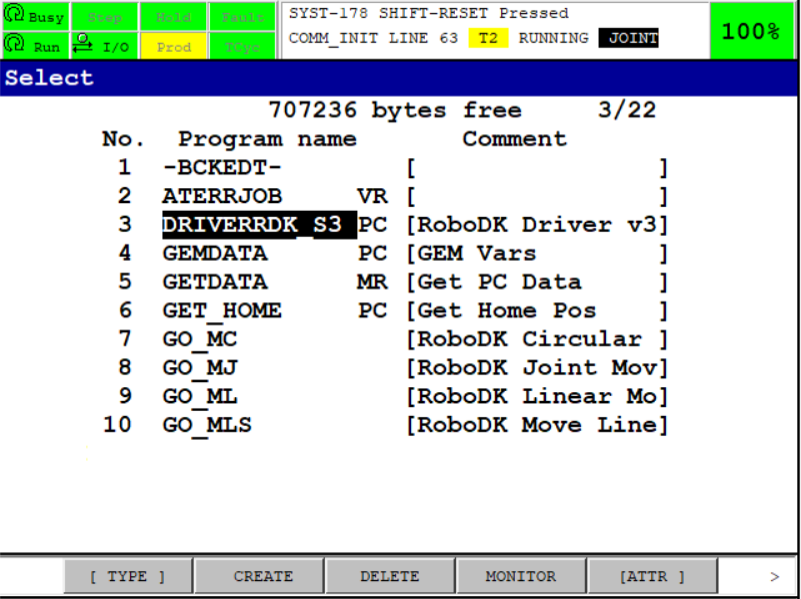
a.DRIVERRDK_S3.PC➔ Il s’agit du programme principal qui gère la communication via S3 (port de communication à prise numéro 3 – S3). Sélectionner la bonne version (les derniers contrôleurs de robot Fanuc nécessitent d’utiliser la version sous le dossier V9).
b.GO_MJ.TP
c.GO_ML.TP
d.GO_MC.TP
e.GO_PROG.TP
Suivre ces étapes sur le teach pendant du robot pour préparer la communication entre votre robot Fanuc et RoboDK :
1.Sélectionner Menu-(Next)-System-[TYPE]-Variables.
a.Sélectionner $HOSTS_CFG (maintenir SHIFT tout en sélectionnant la touche vers le bas vous aidera à faire défiler vers le bas plus rapidement)
b.Sélectionner Number 3
c.Paramétrer $SERVER_PORT à 2000
($HOSTS_CFG[3].$SERVER_PORT = 2000)
2.Sélectionner Menu-Setup
3.Sélectionner [TYPE]-Host comm
4.Sélectionner [SHOW]-Servers
5.Sélectionner “S3”-Enter.
a.Paramétrer Protocol Name à SM
b.Dans Port Name, si plusieurs ports sont disponibles : Paramétré le Port P3 (ou le port correspondant).
c.Paramétrer Inactivity Timeout à 9999
d.Paramétrer Etat de démarrage à [CHOICE] START
e.Paramétrer Etat actuel à STARTED:
Pour ce faire, sélectionner [ACTION]-DEFINE, puis [ACTION]-START
6.Démarrer le programme DRIVERRDK_S3:
a.Sélectionner le bouton Select situé sur le teach pendant.
b.Faire défiler vers le bas jusqu’au programme DRIVERRDK_S3
c.Sélectionner Enter (bouton sur le teach pendant)
d.Sélectionner -Reset et Shift-Forward pour démarrer le programme
Vous voyez le message RUNNING sur le teach pendant. Si le programme échoue pendant l’exécution, il est probable que vous n’ayez pas l’option robot (PC Interface ou User Socket Messaging) ou vous n’avez pas pris la bonne version de programme PC.
7.Dans RoboDK, définir l’adresse IP du robot et sélectionner Connect pour se connecter au robot