Récupérer les Joints robot
Suivre ces étapes pour récupérer les Joints du robot :
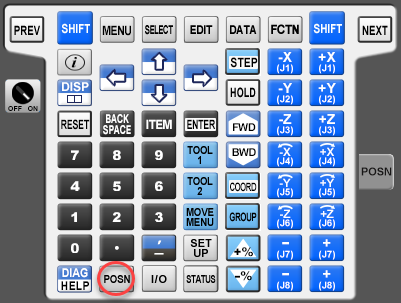
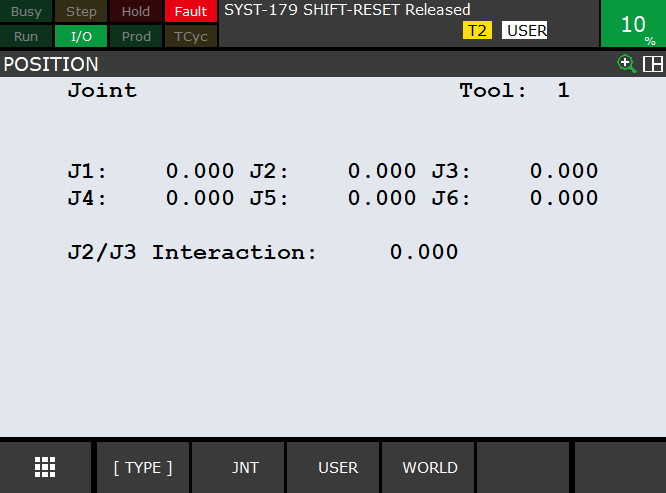
1.Sélectionner POSN (bouton sur le teach pendant) pour voir la position actuelle du robot
2.Sélectionner JNT sur l’écran ou sélectionner COORD (bouton sur le teach pendant) pour sélectionner le mode Joints.