Transférer un programme robot
Suivre ces étapes pour charger un programme depuis une clé USB :
1.Connecter la clé USB sur le teach pendant
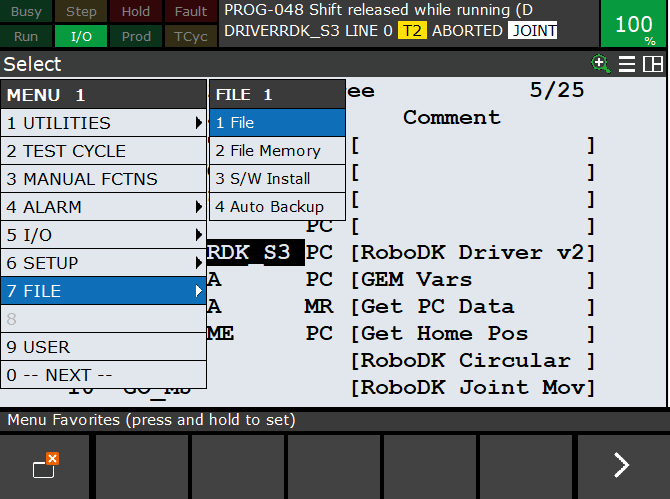
2.Sélectionner Menu➔File
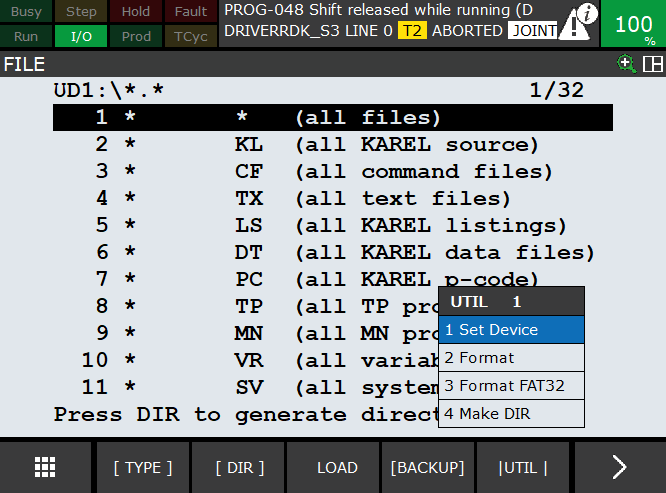
3.Sélectionner Utilities➔Set device➔USB
4.Sélectionner DIR
5.Sélectionner le fichier programme TP ou LS depuis la clé USB (BALLBARTEST.TP par exemple)
Cela va automatiquement enregistrer le fichier dans la mémoire FR du contrôleur.
6.Sélectionner le programme dans la mémoire FR et sélectionner LOAD (bouton sur l’écran)
Important :L’option ASCII Upload est requise pour la programmation hors ligne. Cela permet de charger les fichiers LS directement sur le contrôleur. Les programmes LS (fichiers ASCII) peuvent aussi être compilés aux programmes TP (fichiers binaires) à partir du PC en utilisant les outils Fanuc Winolpc (Maketp).
Important : La vitesse linéaire des programmes créés avec RoboDK est définie par défaut par le registre R[10]. Si la vitesse n’est pas définie dans le programme, elle doit être définie manuellement. Dans ce cas :
Sélectionner : DATA➔Type➔Register, R[10]=50 (pour une vitesse de 50 mm/s)
Sélectionner : DATA➔Type➔Register, R[10]=50 (pour une vitesse de 50 mm/s)