Les robots de Han
Cette section de la documentation fournit une vue d'ensemble du fonctionnement typique des robots de Han en utilisant RoboDK pour envoyer un programme au contrôleur de Han.
Transférer un programme vers le contrôleur de Han
Vous pouvez importer manuellement les programmes de robot générés à partir de RoboDK vers le contrôleur de robot de votre Han.
Vous devez suivre les étapes suivantes pour importer un programme RoboDK dans le contrôleur de Han :
1.Lancez le contrôleur de Han et connectez-vous au robot.
2.Dans RoboDK, cliquez avec le bouton droit de la souris sur le programme que vous souhaitez importer et sélectionnez Generate Robot Program as.....
3.RoboDK vous invitera à enregistrer deux fichiers, l'un est un script ligne par ligne des commandes qui seront envoyées au contrôleur et l'autre un fichier .json à télécharger vers le contrôleur.
4.Sélectionnez l'emplacement où vous souhaitez enregistrer chaque fichier ; le fichier .json peut être enregistré sur une clé USB pour être importé dans le contrôleur en tant que programme.
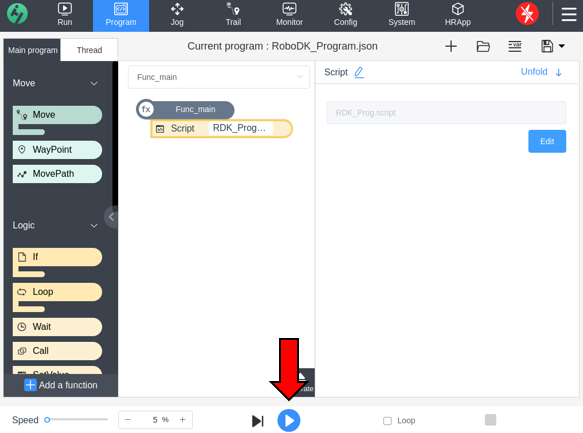
5.Dans le contrôleur, naviguez jusqu'à l'onglet Programme.
6.À droite du nom du "Programme en cours" se trouve une icône de dossier. Sélectionnez cette icône pour ouvrir la liste des fichiers du programme.
7.Sélectionnez le bouton "Importer" au bas de la liste.
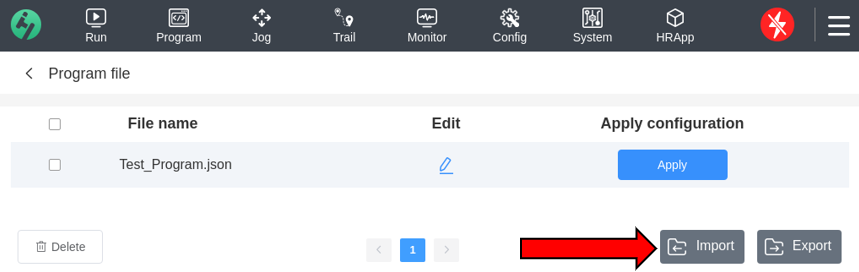
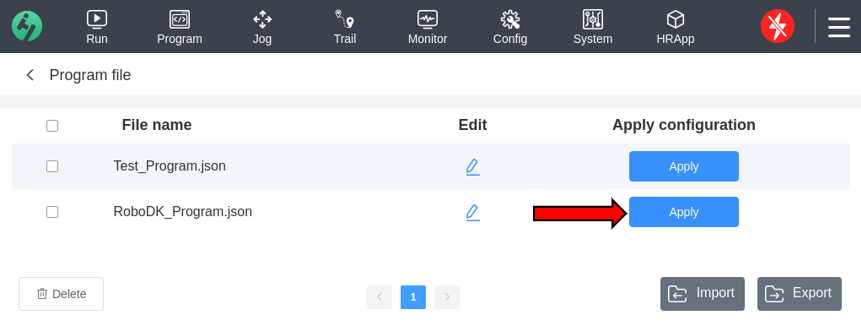
8.Localisez le fichier .json généré par RoboDK sur la clé USB et sélectionnez-le.
9.Cliquez sur "Appliquer" pour définir le programme importé comme programme actif.
10.Le programme RoboDK sera importé en tant que fonction appelant un script.
11.Sélectionnez le bouton de démarrage bleu pour lancer l'exécution du programme sur le robot.