Hanwha robots
RoboDK prend en charge tous les contrôleurs de robots Hanwha. Vous pouvez créer des simulations et des programmes de robot pour Hanwha et vous pouvez également déplacer le vrai robot Hanwha à partir de RoboDK en utilisant le pilote.
Pilote RoboDK pour Hanwha
Les pilotes de robots constituent une alternative à la programmation hors ligne. Avec les pilotes Hanwha, vous pouvez déplacer un robot directement à partir de RoboDK pendant que vous simulez votre programme (programmation en ligne). Pour plus d'informations, consultez la section Pilotes de robot.
Suivez les étapes ci-dessous pour configurer RoboDK afin qu'il fonctionne avec les robots Hanwha.
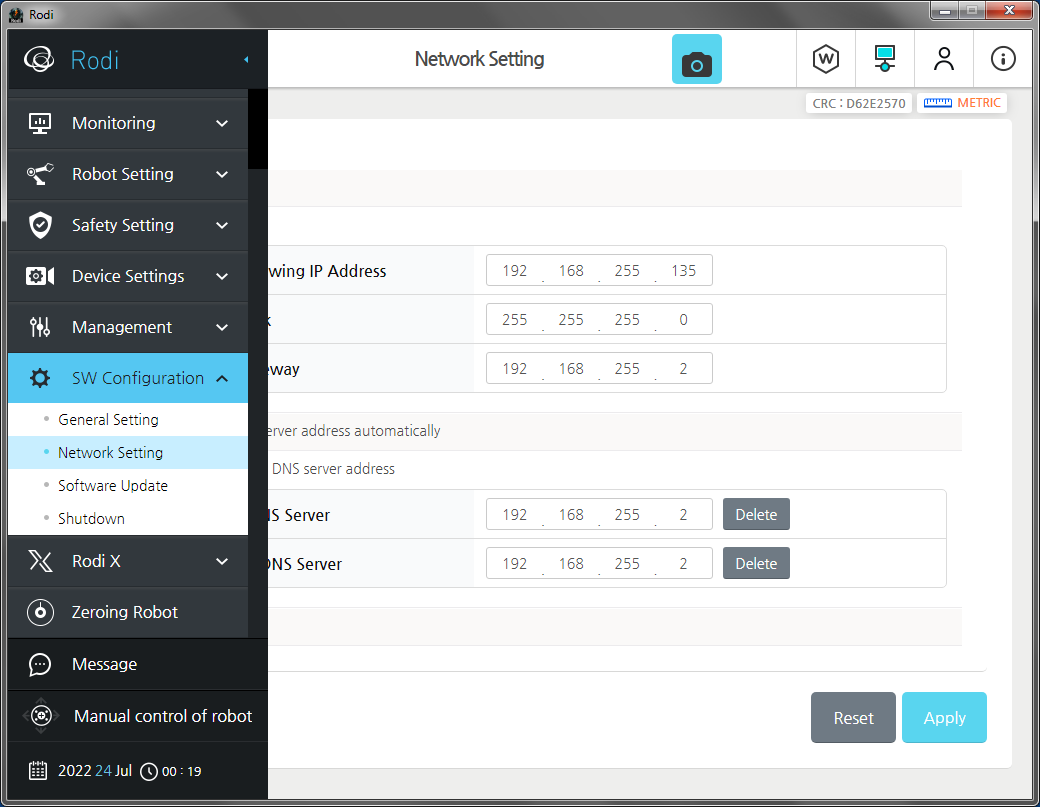
Etape 1. Configurez l'adresse IP du robot
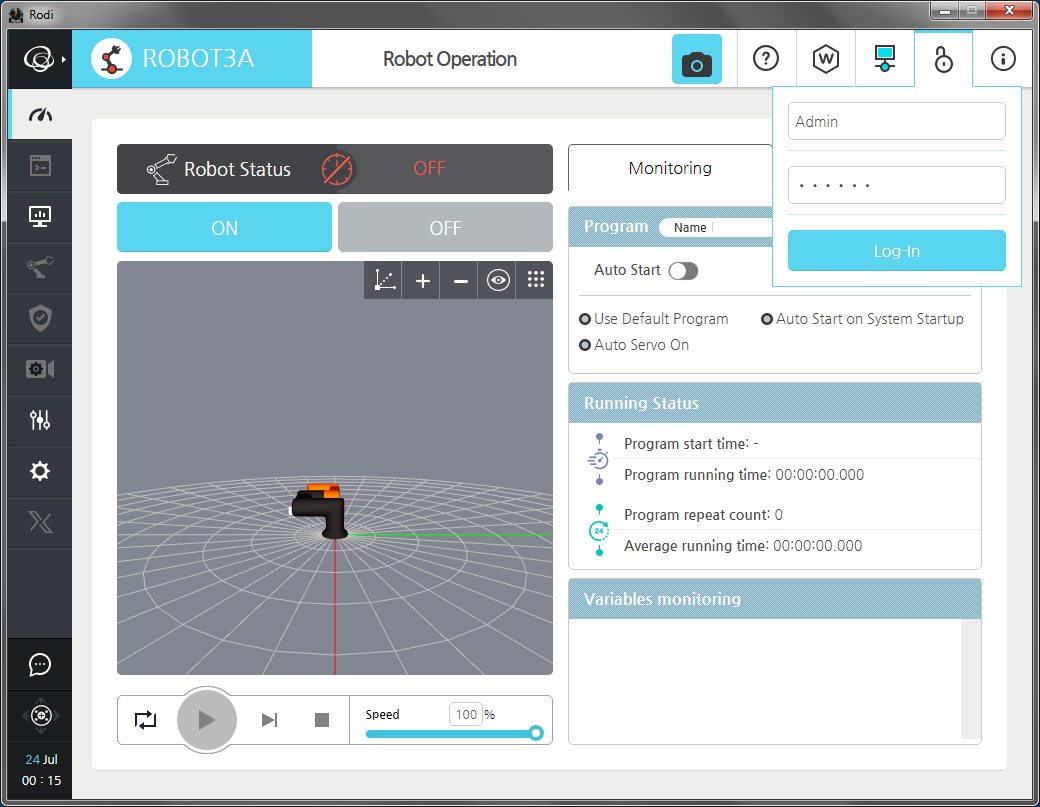
1.Connectez-vous en tant qu'administrateur
2.Ouvrez SW Configuration⇒ Network Setting et remplissez les paramètres de votre réseau local, en particulier l'adresse IP et le masque de sous-réseau. Cliquez sur Appliquer et acceptez de redémarrer si le système vous le demande.
Etape 2 : installez le plug-in RoboDK Connector. Installez le plug-in du connecteur RoboDK
1.Connectez-vous en tant qu'administrateur
2.Préparez une clé USB contenant le fichier RoboDK.asar et branchez-la sur le contrôleur du robot ou le pendentif d'apprentissage.
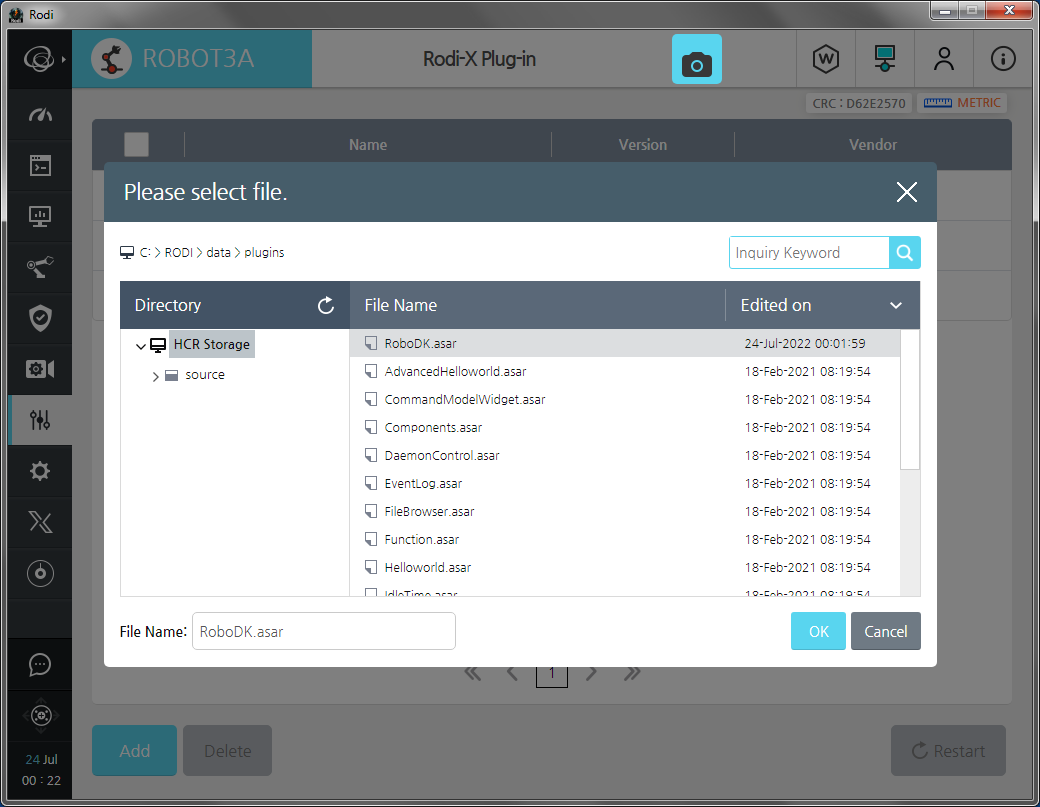
3.Ouvrez Management⇒ Rodi-X Plug-in et cliquez sur le bouton Add-in pour ouvrir la boîte de dialogue Select File.
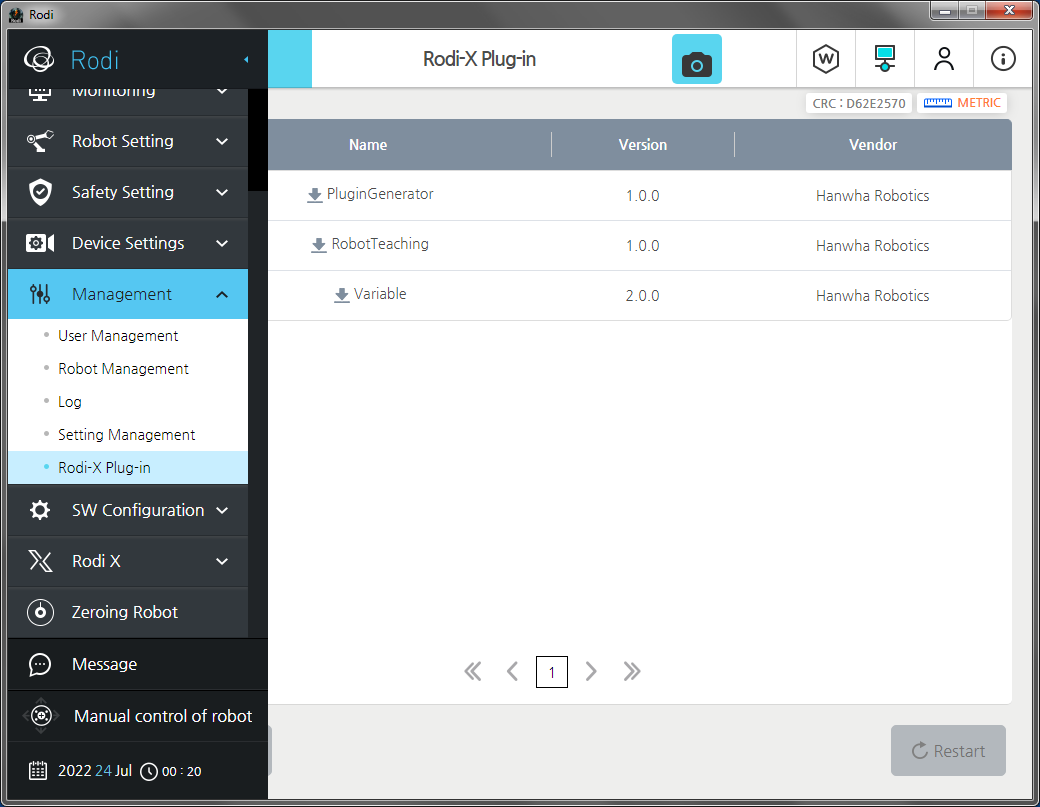
4.Choisissez RoboDK.asar et cliquez sur OK.
5.Appuyez sur le bouton Redémarrer.
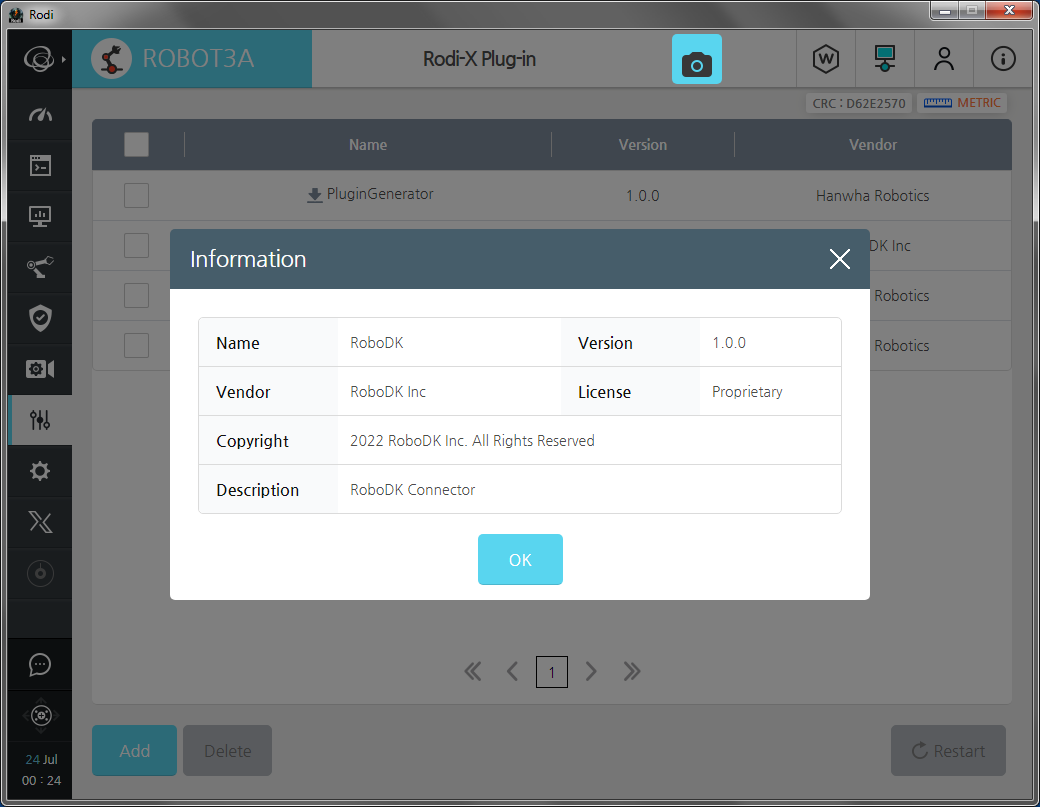
6.Après le rechargement, vous pourrez voir des informations sur le plugin.
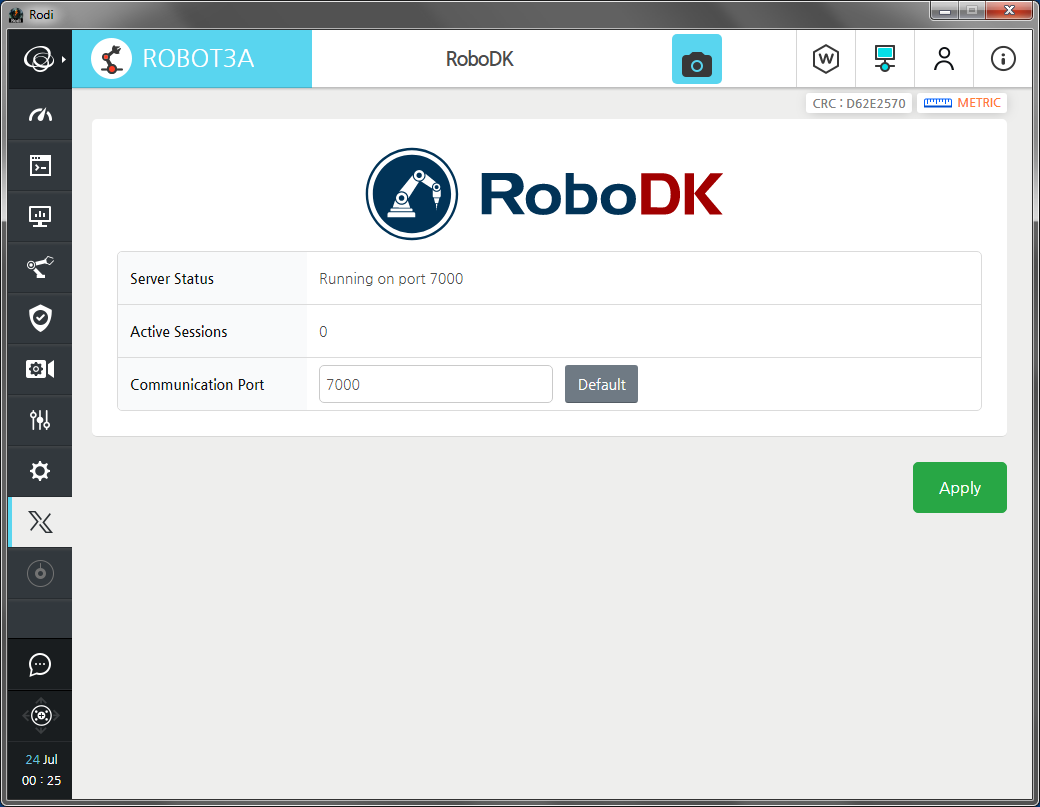
7.⇒Ouvrez RoboDK et assurez-vous que le champ État du serveur ne contient aucun message d'erreur. Si le port CDO 7000 semble être occupé par une autre application, vous pouvez le modifier en saisissant une autre valeur dans le champ Port de communication et en cliquant sur Appliquer.
8.Le robot est maintenant prêt à être télécommandé.
Etape 3. Établissez la connexion avec RoboDK
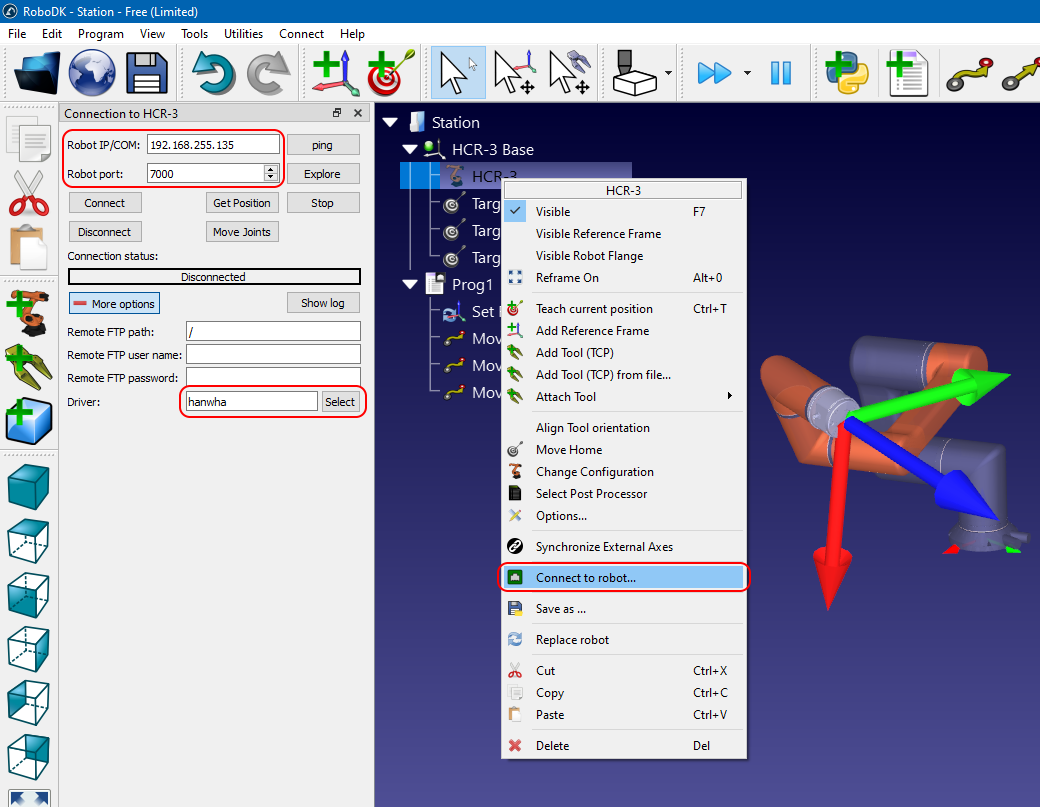
1.Configurez votre projet RoboDK et placez-y l'un des robots Hanwha. Par exemple, le HCR-3.
2.Cliquez avec le bouton droit de la souris sur le robot dans l'arborescence du projet et sélectionnez Connecter au robot...
3.Dans la fenêtre Connection to HCR-3, remplissez les champs Robot IP/COM et Robot port (utilisez l'adresse IP du robot et le numéro de port du plug-in RoboDK).
4.Dans la même fenêtre, cliquez sur le bouton Plus d'options et tapez Hanwha dans le champ Pilote (ou utilisez le bouton Sélectionner pour choisir le pilote approprié dans la liste).
5.Cliquez sur le bouton Connecter et si tous les paramètres sont corrects, vous verrez Ready dans la barre d'état de la connexion.