Pilote RoboDK pour JAKA
Une connexion entre RoboDK et le robot JAKA peut être établie pour déplacer le robot automatiquement à partir d'un PC connecté utilisant RoboDK. Ceci permet d'utiliser l'option RoboDK Run on robot pour la programmation et le débogage en ligne. La connexion peut être établie par le biais d'une connexion Ethernet standard (CDO).
Suivez ces étapes pour configurer le pilote RoboDK pour la programmation en ligne JAKA :
1.Lancez l'application JAKA Zu et connectez-vous au robot dans l'application JAKA Zu.
2.Mettez le robot JAKA Zu sous tension et activez-le.
3.Dans la barre d'outils RoboDK, sélectionnez Connecter➔ Connecter le robot.
4.Sous "Plus d'options", sélectionnez le pilote JAKA : apijaka.py.
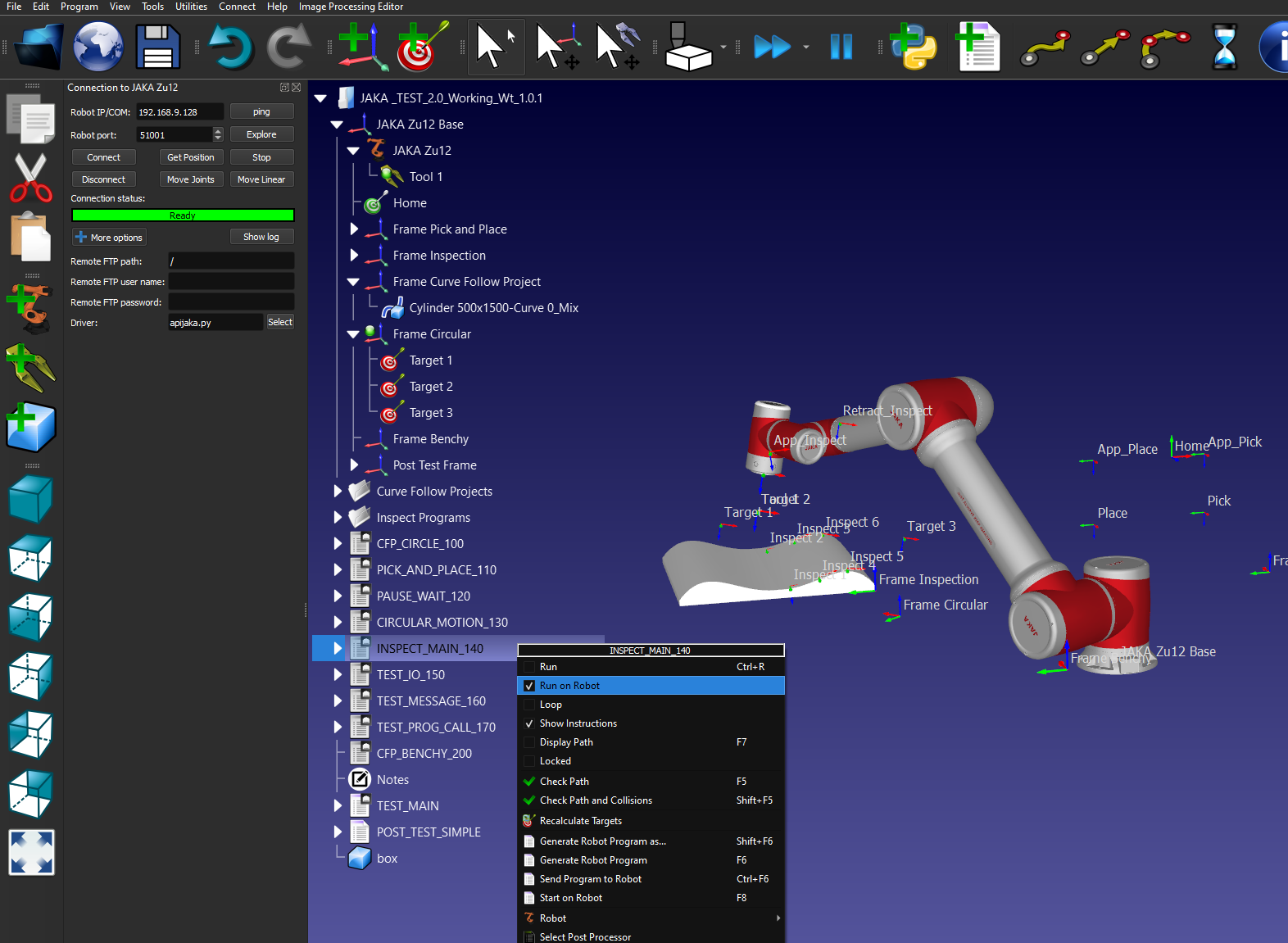
5.Utilisez l'IP et le port de votre robot pour connecter le robot dans RoboDK.
6.Vous pouvez maintenant déplacer le robot JAKA directement à partir de RoboDK
a.Pour déplacer le robot vers une position dans RoboDK, double-cliquez sur la position dans l'arborescence de la station et sélectionnez les boutons "Déplacer les articulations" ou "Déplacer la ligne" dans l'interface de connexion pour effectuer un déplacement articulaire ou linéaire vers la position.
b.Pour exécuter un programme sur le robot à l'aide du pilote, cliquez avec le bouton droit de la souris sur le programme souhaité et sélectionnez l'option "Exécuter sur le robot". Ensuite, double-cliquez sur le programme pour l'exécuter sur le robot.