Remplacer manuellement le système de coordonnées du robot
Les étapes suivantes montrent comment configurer manuellement le système de coordonnées du robot dans l'application JAKA Zu.
Tout d'abord, vous devez créer un système de coordonnées JAKA Zu personnalisé :
1.Dans JAKA Zu, naviguez vers Paramètres➔ Paramètres d'opération➔ Système de coordonnées de l'utilisateur.
2.Cliquez sur le bouton d'édition pour définir les valeurs X, Y, Z, RX, RY et RZ d'un système de coordonnées personnalisé.
3.Sélectionnez confirmer pour enregistrer le système de coordonnées dans JAKA Zu.
Ensuite, vous devez remplacer le système de coordonnées importé par le système de coordonnées JAKA Zu :
4.Suivez les étapes indiquées dans la section Envoyer un programme à JAKA Zu.
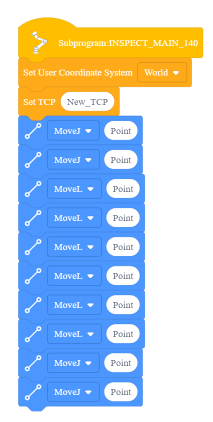
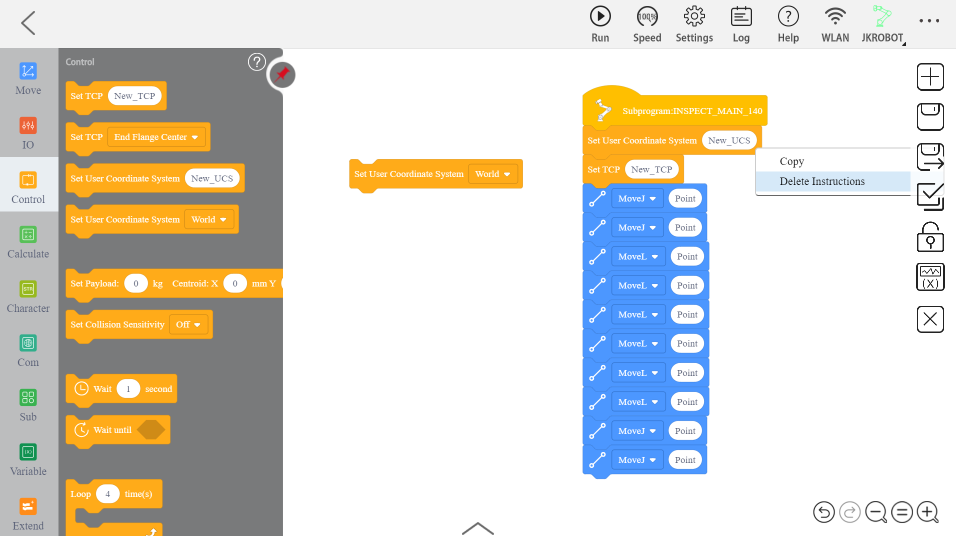
5.Ouvrez l'onglet Contrôle dans la barre latérale et localisez la tuile "Définir le système de coordonnées de l'utilisateur" qui contient la liste déroulante.
6.Supprimez la tuile "New_UCS" qui a été importée automatiquement en cliquant avec le bouton droit de la souris et en sélectionnant "supprimer".
7.Remplacez la tuile supprimée par la tuile "Définir le système de coordonnées de l'utilisateur" et sélectionnez le système de coordonnées personnalisé dans la liste déroulante.