Robots JAKA
Cette section de la documentation fournit une vue d'ensemble du fonctionnement typique des robots JAKA utilisant le logiciel RoboDK pour envoyer un programme à l'appli du contrôleur de robot JAKA.
Les caractéristiques disponibles sont les suivantes :
1.Contrôle du robot en temps réel à l'aide du pilote et de la fonction "Run on Robot".
2.Envoyer un programme à l'application JAKA Zu en utilisant le post-processeur et "Envoyer le programme au Robot" ou charger manuellement le programme dans JAKA Zu en important le fichier .zip généré par RoboDK.
Envoyez un programme au contrôleur JAKA via RoboDK
Vous pouvez envoyer un programme à votre contrôleur de robot JAKA en quelques clics à partir d'une simulation RoboDK.
Vous devez suivre les étapes suivantes pour charger un programme de RoboDK dans JAKA Zu :
1.Lancez l'application JAKA Zu et connectez-vous au robot dans l'application JAKA Zu.
2.Mettez le robot JAKA Zu sous tension et activez-le.
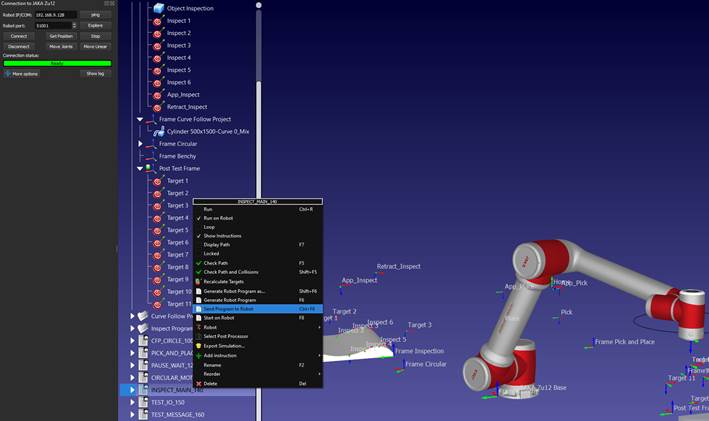
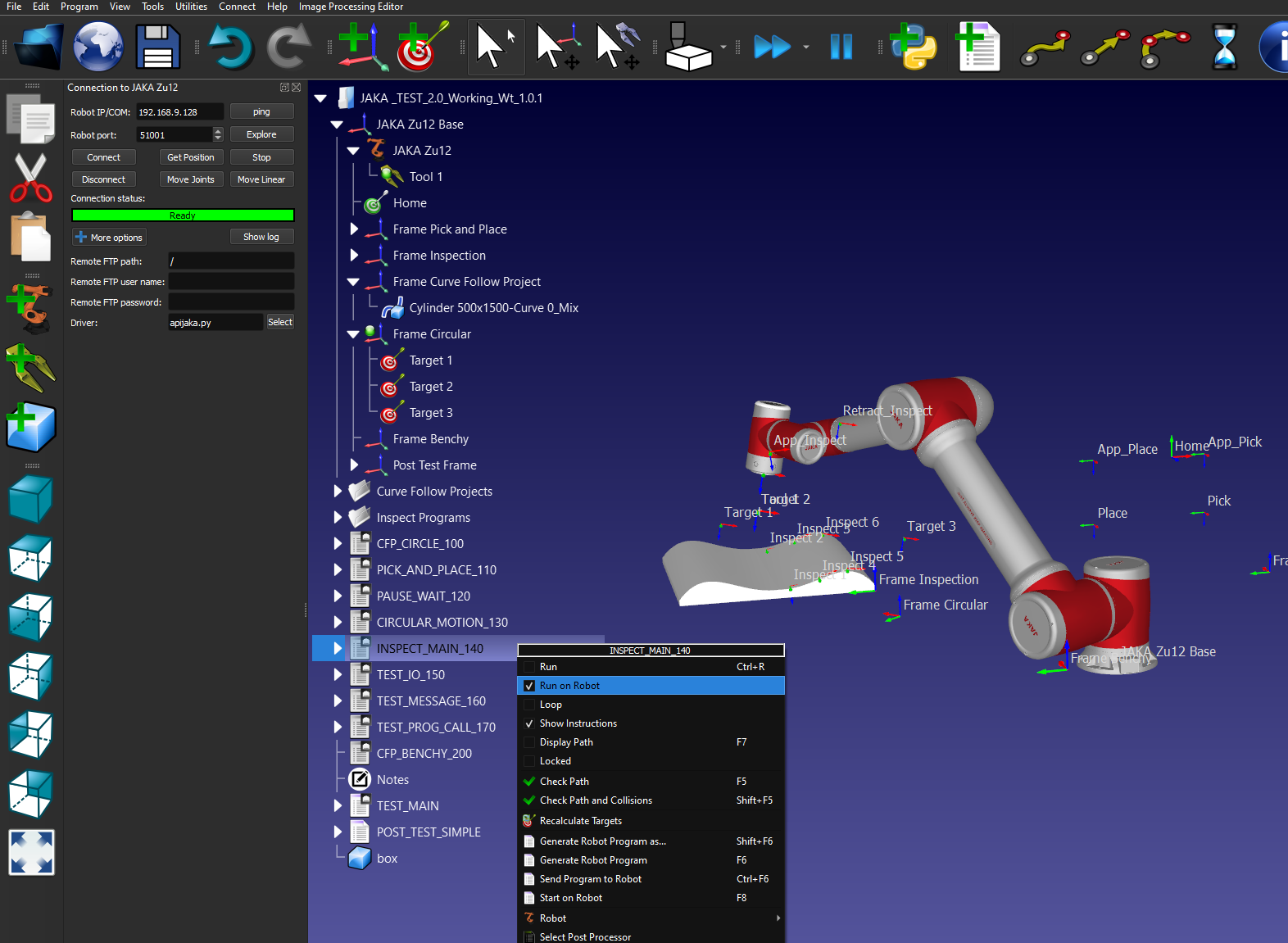
3.Dans la barre d'outils RoboDK, sélectionnez Connect➔ Connect Robot.
Sous More options, assurez-vous que vous avez sélectionné le pilote JAKA : apijaka.py.
4.Utilisez l'IP et le port de votre robot pour connecter le robot dans RoboDK.
5.Cliquez avec le bouton droit de la souris sur le programme que vous souhaitez envoyer à JAKA Zu et sélectionnez Envoyer le programme au robot.
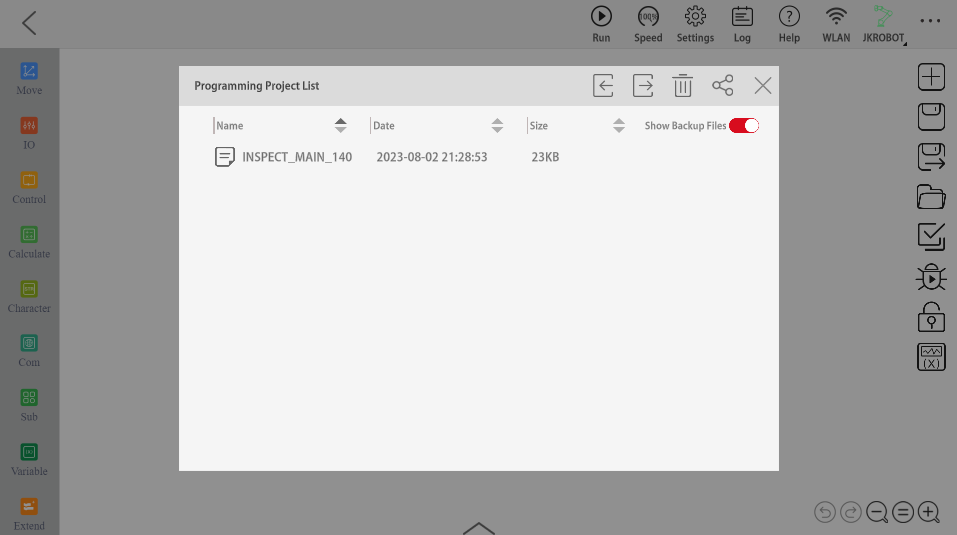
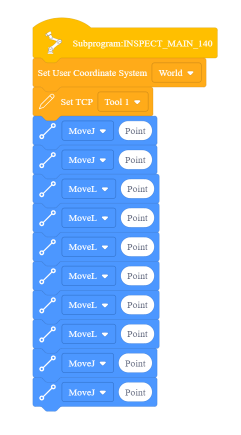
6.Dans JAKA Zu, naviguez jusqu'à l'onglet Contrôle de programmation.
7.Ouvrez la liste des projets de programmation en cliquant sur l'icône du dossier et sélectionnez le programme importé.
Importer manuellement un programme sur le contrôleur JAKA
Vous pouvez importer manuellement les programmes de robot générés à partir de RoboDK vers votre contrôleur de robot JAKA.
Vous devez suivre les étapes suivantes pour importer un programme RoboDK dans JAKA Zu :
1.Lancez l'application JAKA Zu et connectez-vous au robot dans l'application JAKA Zu.
2.Mettez le robot JAKA Zu sous tension et activez-le.
3.Cliquez avec le bouton droit de la souris sur le programme que vous souhaitez importer dans JAKA Zu et sélectionnez Generate Robot Program as.....
4.Sélectionnez l'emplacement où vous souhaitez que le programme soit enregistré.
5.Dans JAKA Zu, naviguez jusqu'à l'onglet Contrôle de programmation.
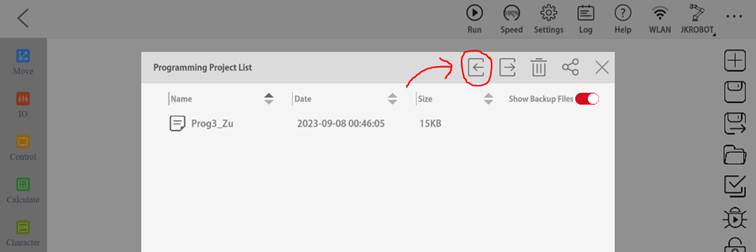
6.Ouvrez la liste des projets de programmation en cliquant sur l'icône du dossier et cliquez sur l'icône d'importation.
7.Localisez et sélectionnez le fichier .zip généré par RoboDK.
8.Ouvrez la liste des projets de programmation et sélectionnez le programme importé.
Remplacer manuellement le système de coordonnées du robot
Les étapes suivantes montrent comment configurer manuellement le système de coordonnées du robot dans l'application JAKA Zu.
Tout d'abord, vous devez créer un système de coordonnées JAKA Zu personnalisé :
1.Dans JAKA Zu, naviguez vers Paramètres➔ Paramètres d'opération➔ Système de coordonnées de l'utilisateur.
2.Cliquez sur le bouton d'édition pour définir les valeurs X, Y, Z, RX, RY et RZ d'un système de coordonnées personnalisé.
3.Sélectionnez confirmer pour enregistrer le système de coordonnées dans JAKA Zu.
Ensuite, vous devez remplacer le système de coordonnées importé par le système de coordonnées JAKA Zu :
4.Suivez les étapes indiquées dans la section Envoyer un programme à JAKA Zu.
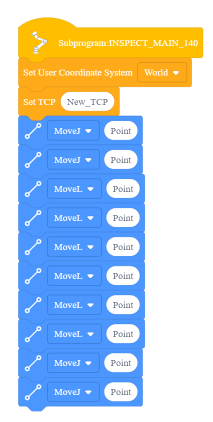
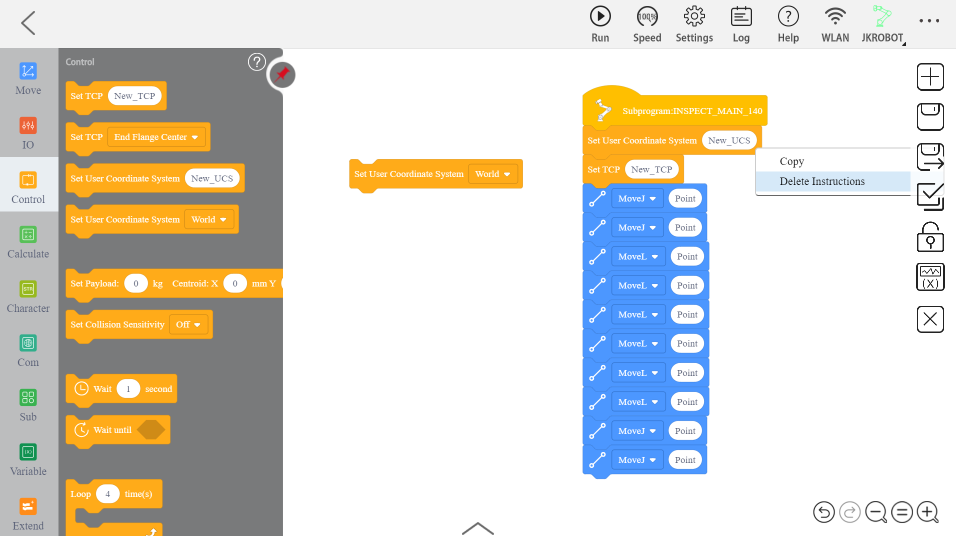
5.Ouvrez l'onglet Contrôle dans la barre latérale et localisez la tuile "Définir le système de coordonnées de l'utilisateur" qui contient la liste déroulante.
6.Supprimez la tuile "New_UCS" qui a été importée automatiquement en cliquant avec le bouton droit de la souris et en sélectionnant "supprimer".
7.Remplacez la tuile supprimée par la tuile "Définir le système de coordonnées de l'utilisateur" et sélectionnez le système de coordonnées personnalisé dans la liste déroulante.
Remplacement manuel de l'outil du robot (CDO)
Vous pouvez également configurer manuellement le CDO par l'intermédiaire de l'appli JAKA Zu. Les étapes suivantes décrivent ce processus.
Tout d'abord, vous devez créer un outil JAKA Zu personnalisé :
1.Dans JAKA Zu, naviguez vers Paramètres➔ Paramètres d'opération➔ Paramètres CDO.
2.Cliquez sur le bouton d'édition pour définir les valeurs X, Y, Z, RX, RY et RZ pour le CDO personnalisé.
3.Sélectionnez confirmer pour enregistrer l'outil dans JAKA Zu.
Ensuite, vous devez remplacer l'outil importé par l'outil JAKA Zu :
4.Suivez les étapes indiquées dans la section Envoyer un programme à JAKA Zu.
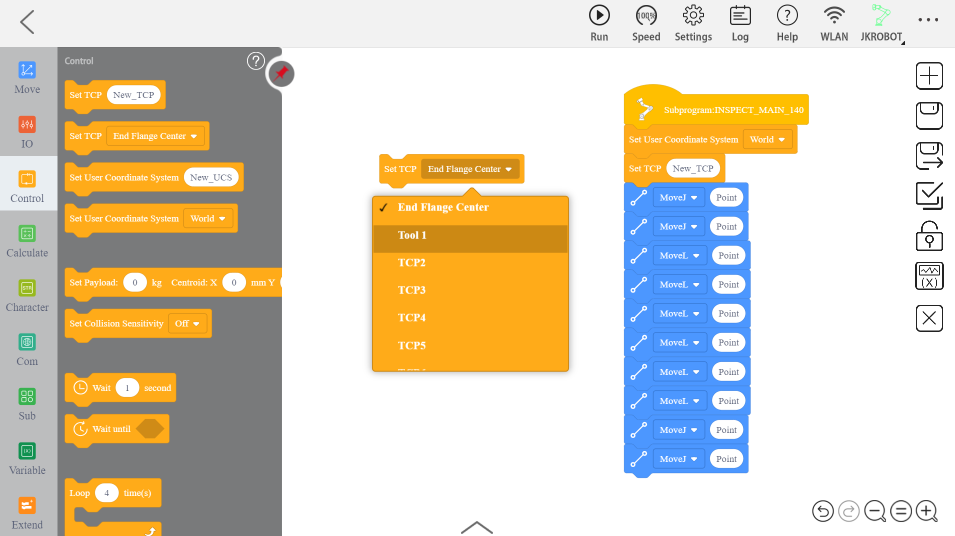
5.Ouvrez l'onglet Contrôle dans la barre latérale et localisez la tuile "Set CDO" contenant la liste déroulante.
6.Supprimez la tuile "New_TCP" qui a été automatiquement importée en cliquant avec le bouton droit de la souris et en sélectionnant "supprimer".
7.Remplacez la tuile supprimée par la tuile déroulante "Set CDO".
8.Sélectionnez l'outil souhaité dans le menu déroulant.
Démarrez un programme de robot
Suivez les étapes suivantes pour démarrer un programme de robot sur un robot JAKA.
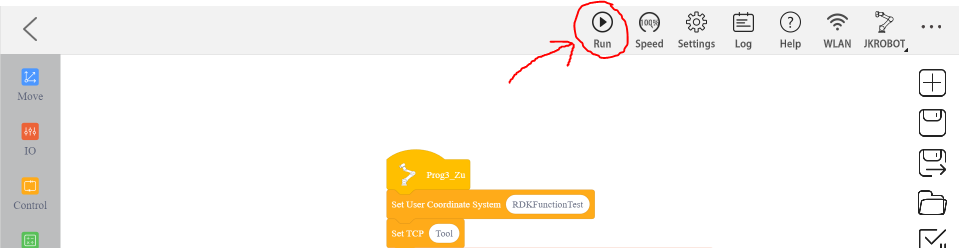
1.Suivez les étapes indiquées dans la section Envoyer un programme à JAKA Zu.
2.Dans la barre d'outils supérieure, sélectionnez "Exécuter".
Pilote RoboDK pour JAKA
Une connexion entre RoboDK et le robot JAKA peut être établie pour déplacer le robot automatiquement à partir d'un PC connecté utilisant RoboDK. Ceci permet d'utiliser l'option RoboDK Run on robot pour la programmation et le débogage en ligne. La connexion peut être établie par le biais d'une connexion Ethernet standard (CDO).
Suivez ces étapes pour configurer le pilote RoboDK pour la programmation en ligne JAKA :
1.Lancez l'application JAKA Zu et connectez-vous au robot dans l'application JAKA Zu.
2.Mettez le robot JAKA Zu sous tension et activez-le.
3.Dans la barre d'outils RoboDK, sélectionnez Connecter➔ Connecter le robot.
4.Sous "Plus d'options", sélectionnez le pilote JAKA : apijaka.py.
5.Utilisez l'IP et le port de votre robot pour connecter le robot dans RoboDK.
6.Vous pouvez maintenant déplacer le robot JAKA directement à partir de RoboDK
a.Pour déplacer le robot vers une position dans RoboDK, double-cliquez sur la position dans l'arborescence de la station et sélectionnez les boutons "Déplacer les articulations" ou "Déplacer la ligne" dans l'interface de connexion pour effectuer un déplacement articulaire ou linéaire vers la position.
b.Pour exécuter un programme sur le robot à l'aide du pilote, cliquez avec le bouton droit de la souris sur le programme souhaité et sélectionnez l'option "Exécuter sur le robot". Ensuite, double-cliquez sur le programme pour l'exécuter sur le robot.
Récupération de l'adresse IP du simulateur virtuel JAKA
Pour récupérer une adresse IP du simulateur virtuel, vous devez décoder la chaîne Base64 requise dans le champ Adresse du robot illustré ci-dessous :
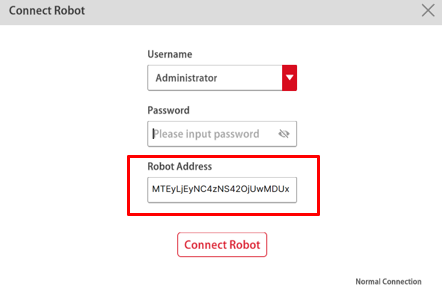
En utilisant des outils tels que https://www.base64decode.net/, vous pouvez récupérer l'IP et le port du robot à partir de l'adresse du robot.


Dans cet exemple, l'adresse IP est 112.124.35.6 et le port 50051.