Contrôleurs KEBA
Vous pouvez programmer les contrôleurs KEBA à partir de RoboDK en utilisant deux méthodes différentes : Vous pouvez générer des programmes de robot hors ligne en utilisant le post-processeur KEBA KAIRO ou en utilisant le pilote RoboDK.
En utilisant le post-processeur KEBA KAIRO, vous pouvez obtenir des fichiers KAIRO qui peuvent être chargés sur le contrôleur KEBA à l'aide de RoboDK. Cette opération est réalisée à l'aide du post-processeur par défaut utilisé pour les robots KEBA. Vous pouvez également transférer directement les fichiers du programme de script en utilisant le FTP ou une clé USB.
En outre, en utilisant le pilote pour les robots KEBA, vous pouvez exécuter des programmes sur le robot à partir de RoboDK si le robot est connecté à l'ordinateur.
Récupérez l'IP du contrôleur KEBA
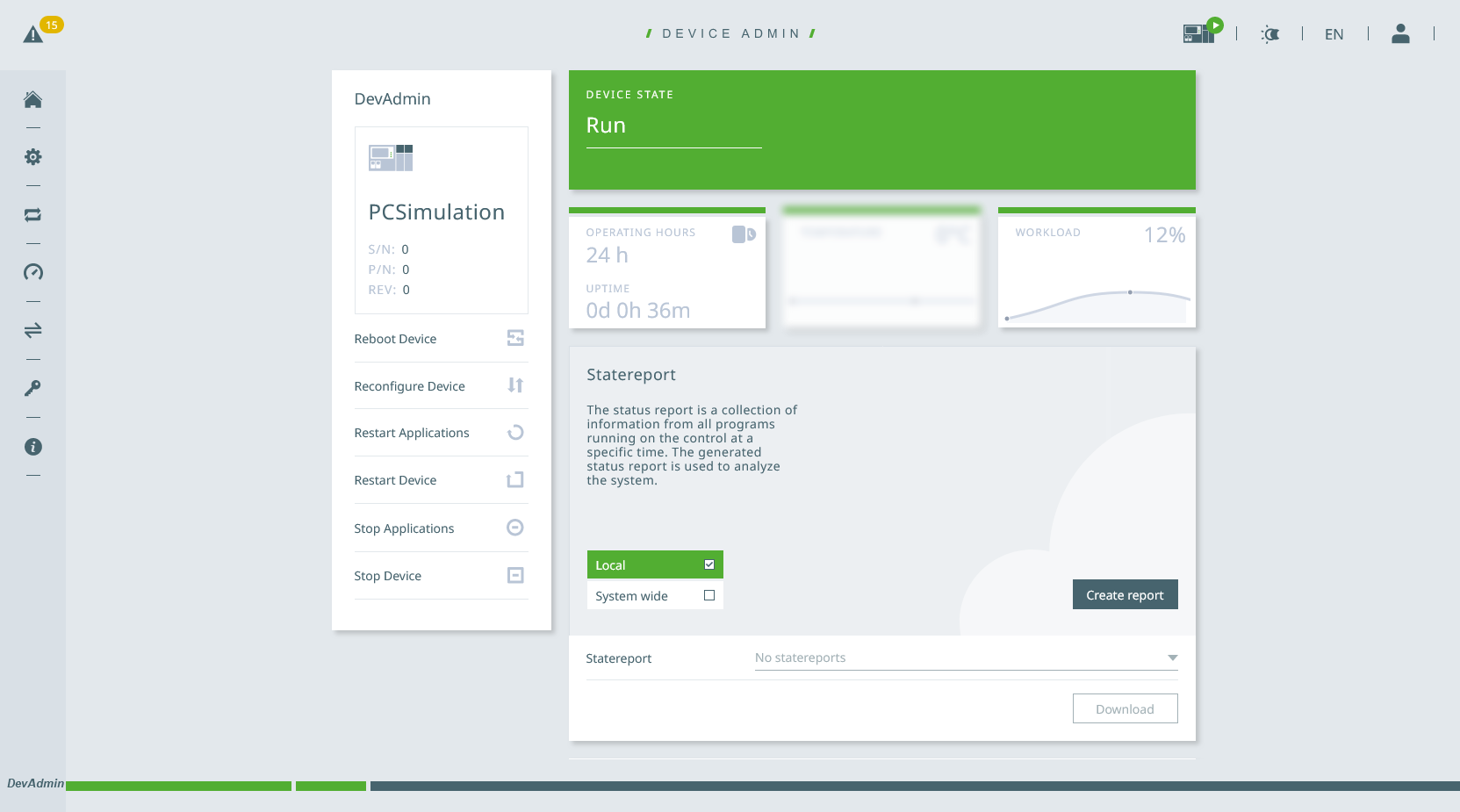
Vous avez besoin de l'IP de votre contrôleur KEBA pour transférer ou exécuter automatiquement des programmes à partir de RoboDK. Vous pouvez vous assurer que l'IP de votre robot est correcte en entrant l'IP dans un navigateur pour accéder à l'interface web
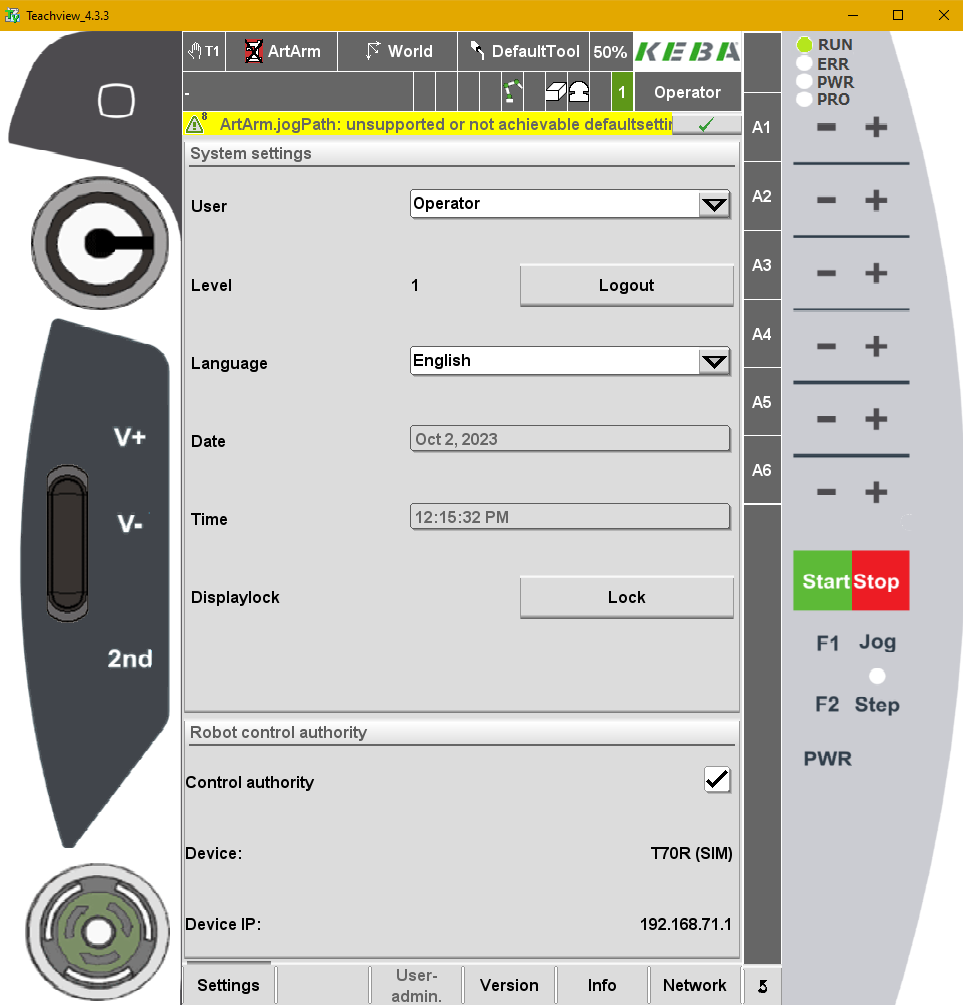
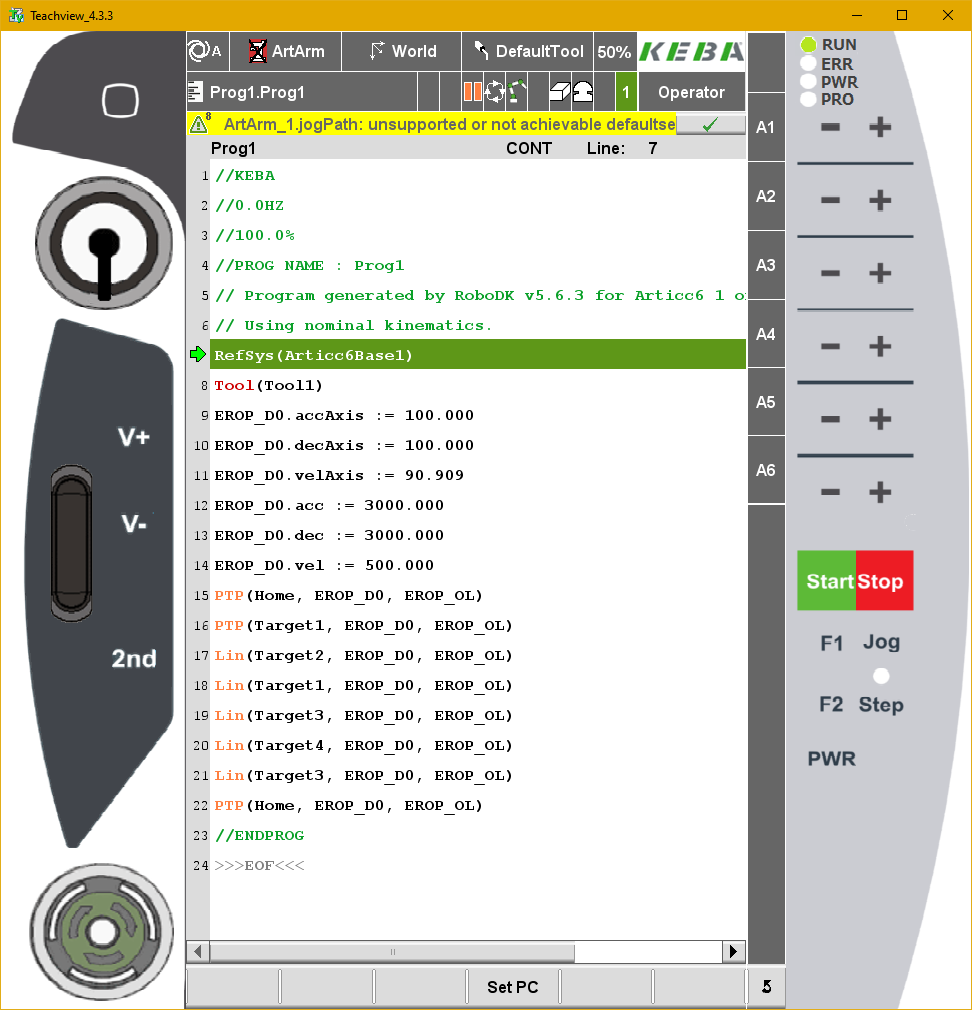
Pour obtenir l'IP, vous pouvez aller dans la fenêtre de service de votre pendentif d'apprentissage et sélectionner ensuite l'onglet d'information.
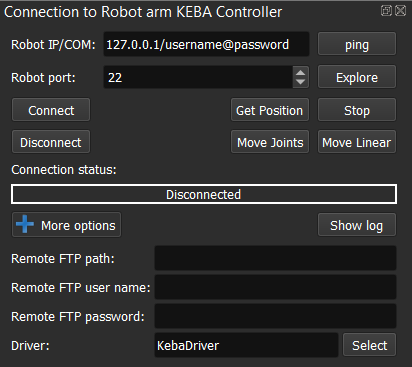
Le format de l'adresse IP saisie dans RoboDK doit contenir le nom d'utilisateur et le mot de passe et doit suivre ce format : .127.0.0.1/username@password
Les images suivantes montrent comment récupérer l'IP du contrôleur à partir du boîtier d'apprentissage du contrôleur.


Assurez-vous d'avoir correctement configuré une connexion réseau si vous ne parvenez pas à voir l'interface Web du robot, comme le montre l'image suivante.
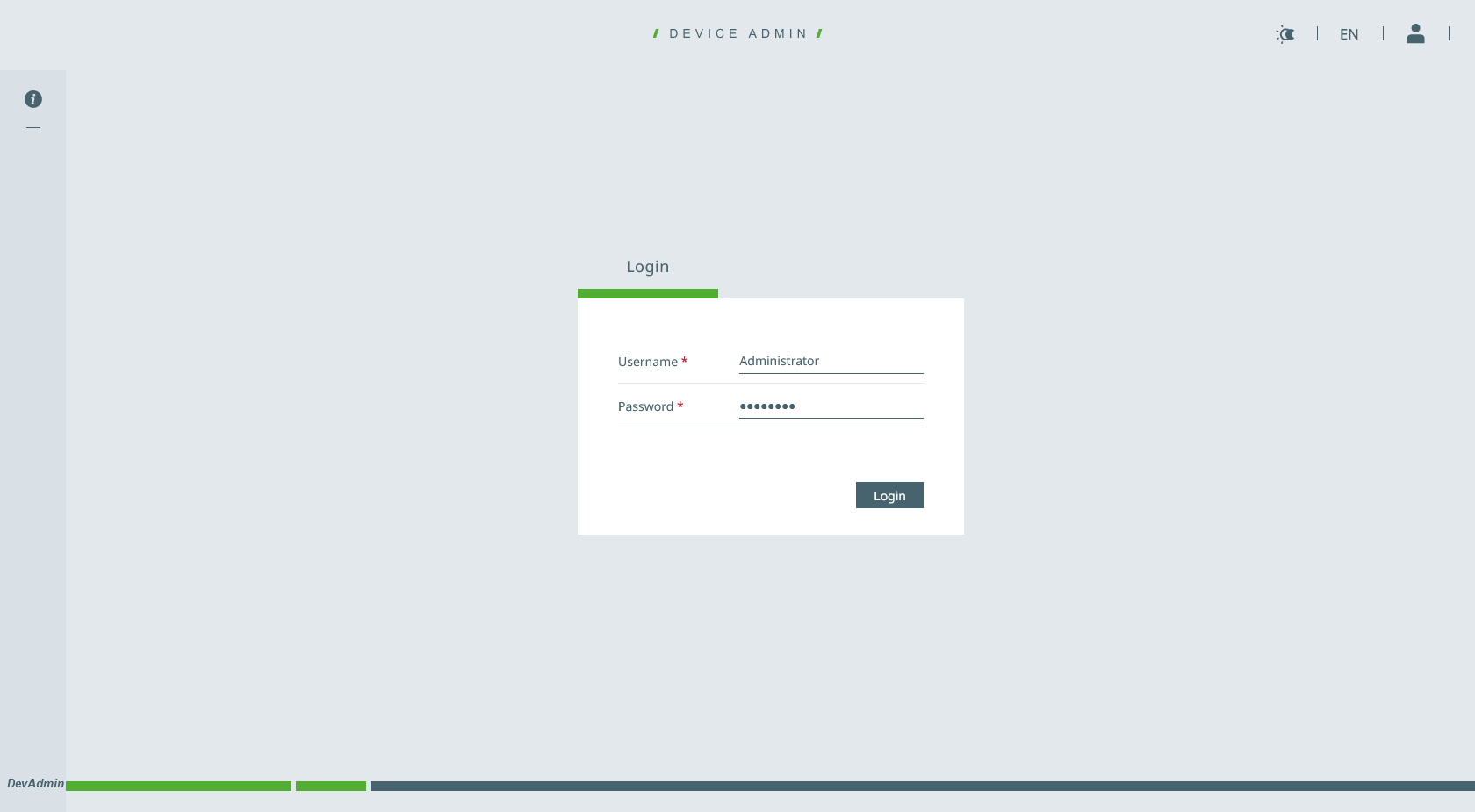
Vous aurez également besoin du nom d'utilisateur et du mot de passe utilisés pour vous connecter à l'interface web du robot. Vous pouvez vérifier qu'ils sont valides en vous connectant via l'interface web.
Exécuter un programme sur le contrôleur KEBA
Une fois que votre simulation RoboDK est prête, vous pouvez générer un programme hors ligne qui peut être exécuté par le contrôleur du robot KEBA (fichier KAIRO).
Suivez ces étapes pour générer un programme pour votre contrôleur (fichier KAIRO) à partir de la simulation de votre robot :
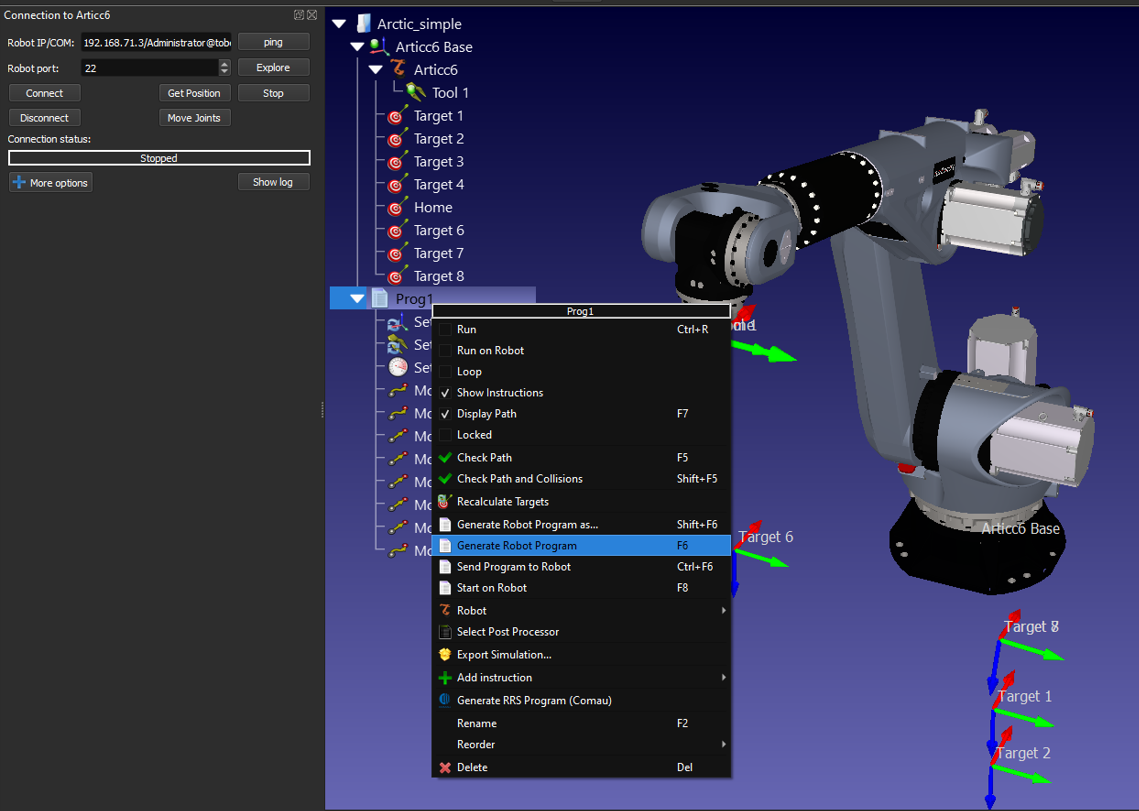
1.Cliquez avec le bouton droit de la souris sur un programme.
2.Sélectionnez Générer un programme de robot F6. Transférez ensuite manuellement les fichiers par FTP vers le projet de votre choix.
Vous pouvez également sélectionner le programme Générer un robot Ctrl+F6 après avoir configuré SFTP.
3.Dans l'onglet projet du pendentif d'apprentissage, appuyez sur rafraîchir
4.Chargez le programme puis le fichier principal

Le programme s'affiche dans un éditeur de texte. Vous trouverez plus d'informations sur la manière de générer des programmes à partir de RoboDK dans la section Programme du robot de la documentation.
Exécuter un programme à partir de RoboDK
Les pilotes de robots offrent une alternative à la programmation hors ligne (où un programme est généré, puis transféré au robot et exécuté). Vous pouvez exécuter une simulation à partir de RoboDK directement sur le robot (programmation en ligne). Vous trouverez de plus amples informations sur les pilotes dans la section Pilotes de robot.
Procédez comme suit pour vous connecter au robot à partir de RoboDK :
1.Cliquez avec le bouton droit de la souris sur le robot dans RoboDK.
2.Sélectionnez : 
3.Saisissez l'IP du robot.
4.Sélectionnez Connecter.
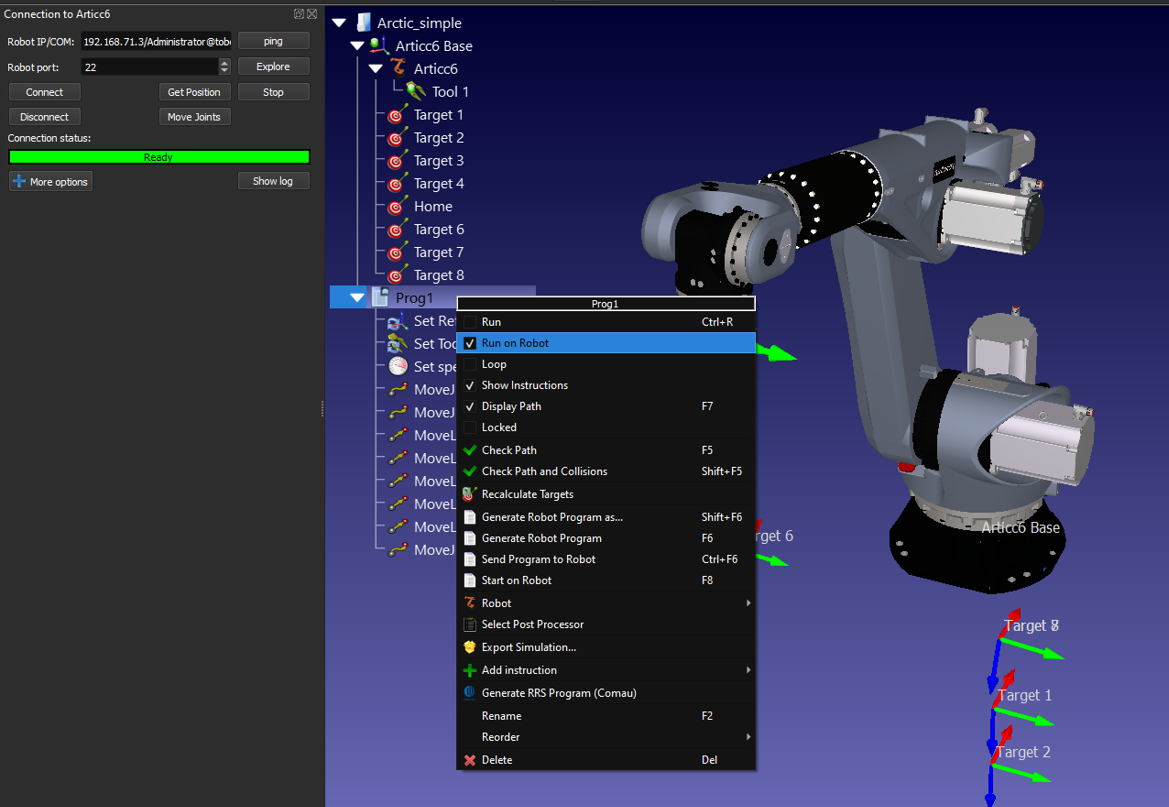
Un message vert doit s'afficher Prêt si la connexion a réussi. Si ce n'est pas le cas, vérifiez que vous avez l'adresse IP, le nom d'utilisateur et le mot de passe corrects. Veillez également à formater correctement l'adresse IP dans RoboDK comme indiqué dans les sections précédentes (127.0.0.1/nom d'utilisateur@mot de passe).
Le robot peut être déplacé en sélectionnant Obtenir les articulations du robot dans le menu de connexion, en faisant avancer le robot et en cliquant sur Déplacer les articulations pour déplacer le robot dans le menu de connexion.
Pour exécuter des programmes à partir du PC directement sur votre robot, vous devez activer l'option Exécuter sur le robot dans vos programmes. Les étapes suivantes décrivent comment activer l'option Exécuter sur le robot :
a.Cliquez avec le bouton droit de la souris sur le programme (Print3D dans cet exemple).
b.Sélectionnez Exécuter sur le robot
c.Double-cliquez sur le programme pour le démarrer (ou cliquez avec le bouton droit de la souris et sélectionnez Exécuter).
Cette méthode de programmation des robots est utile à des fins de débogage. Toutefois, pour déployer un programme de robot, il est préférable de générer le programme hors ligne, comme indiqué dans la section précédente.
Une fois que l'option Exécuter sur le robot est cochée, le programme se connectera au robot réel chaque fois que vous double-cliquerez sur un programme (ou que vous ferez un clic droit, puis que vous sélectionnerez Exécuter).
Ces opérations sont également disponibles à partir de l'API RoboDK et permettent d'intégrer la programmation de robots à d'autres applications. L'API est disponible en Python, C# et d'autres langages de programmation.
Utilisation du fichier PPK pour SFTP
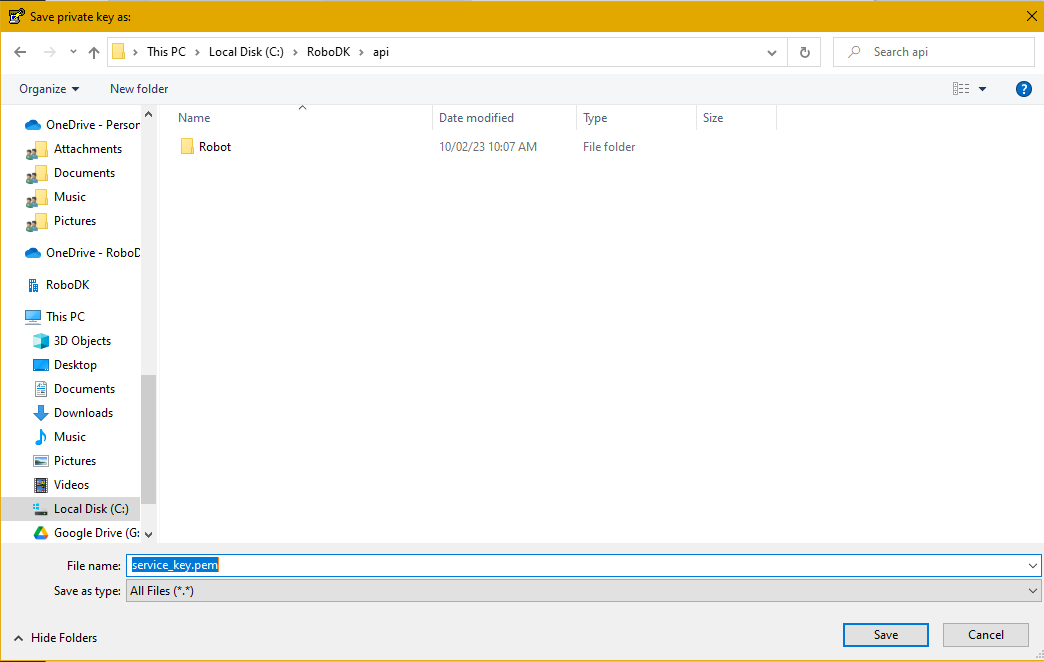
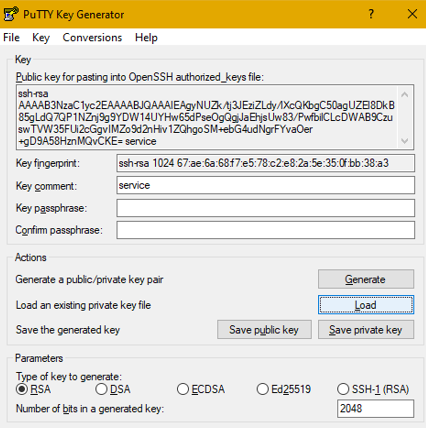
Au lieu d'utiliser le nom d'utilisateur et le mot de passe pour transférer des fichiers, vous pouvez également utiliser un fichier clé. Pour ce faire, vous devrez convertir le fichier PPK fourni par KEBA avec votre robot en un fichier PEM. Cela peut être fait avec puttygen, un utilitaire qui est installé avec putty.
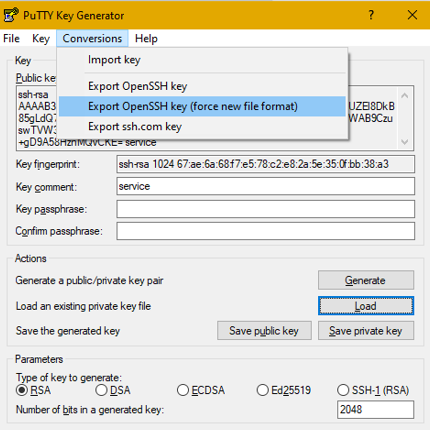
Dans puttygen, chargez le fichier de clé en sélectionnant Load. Cliquez ensuite sur le menu déroulant Conversions et sélectionnez Export open SSH Key (force new file format).
Nommez le fichier service_key.pem et enregistrez-le dans le dossier RoboDK API qui est situé à C:\RoboDK\api par défaut.