Récupération des Joints robot
Les étapes suivantes permettent de récupérer les Joints du robot :
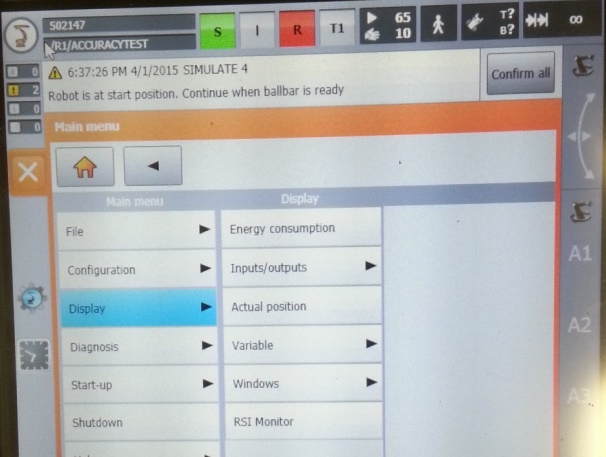
1.Sélectionner MENU➔Display➔Actual position
2.Sélectionner le mode Joints et utiliser la colonne de gauche pour prendre les valeurs Joints.
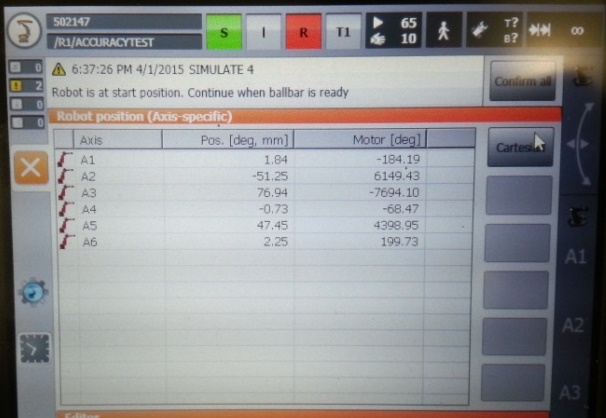
Astuce : Il est possible de récupérer les articulations du robot plus précisément (précision de 5 décimales) en surveillant la variable $AXIS_ACT ou simplement en utilisant le pilote de robot RoboDK pour KUKA et en sélectionnant le bouton Get robot joints.