Récupération du TCP
Les étapes suivantes autorise la création ou modification des outils robot (TCP, connu en tant que $BASE dans la programmation robotique du KRC KUKA):
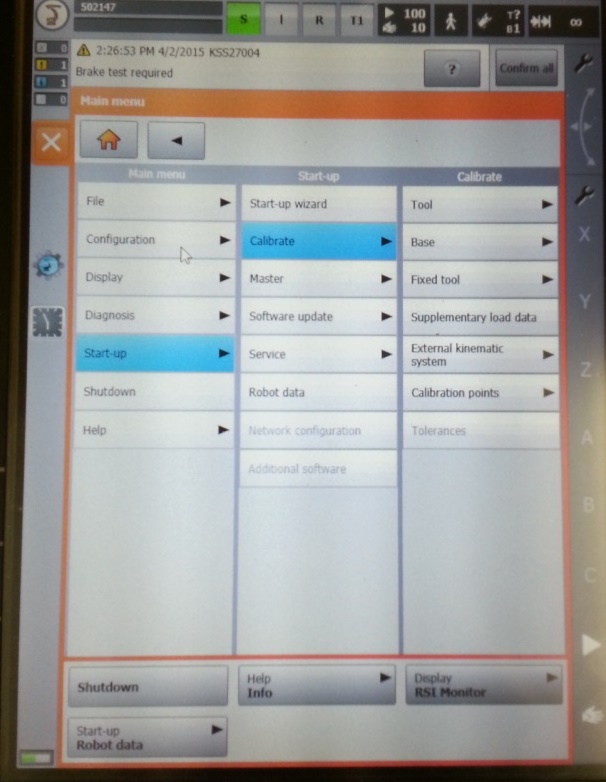
1.Sélectionner MENU➔Start-up➔Calibrate➔Tool
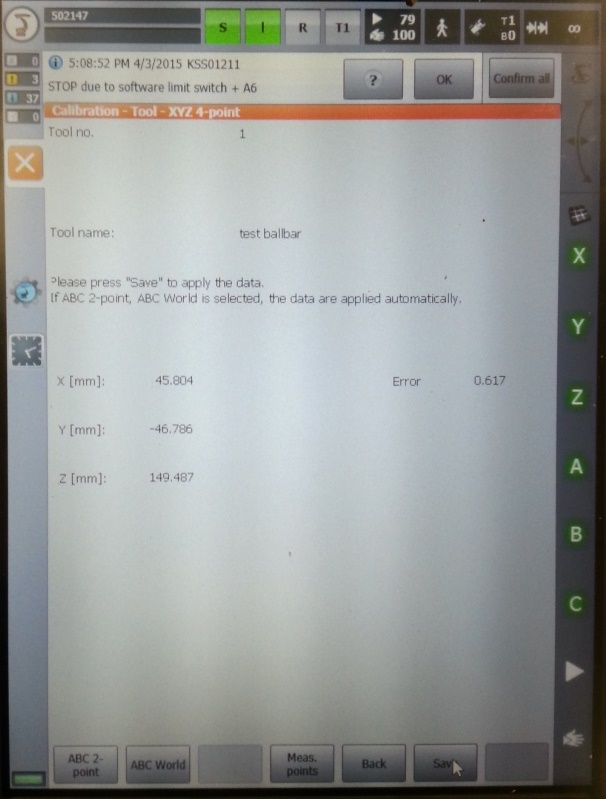
2.Sélectionner un outil et éditer ou récupérer la position X,Y,Z du TCP.