Exécutez un programme sur le contrôleur Mecademic
Une fois que votre simulation RoboDK est prête, vous pouvez générer un programme hors ligne qui peut être exécuté par le contrôleur de robot Mecademic (fichier script). Vous pouvez également générer un fichier PY qui exécutera le programme sur le contrôleur du robot à partir d'un ordinateur distant.
Procédez comme suit pour générer un programme hors ligne (un script ou un fichier PY) à partir de votre simulation de robot :
1.Cliquez avec le bouton droit de la souris sur un programme (Prog1 dans cet exemple).
2.Sélectionnez Générer un programme robot F6
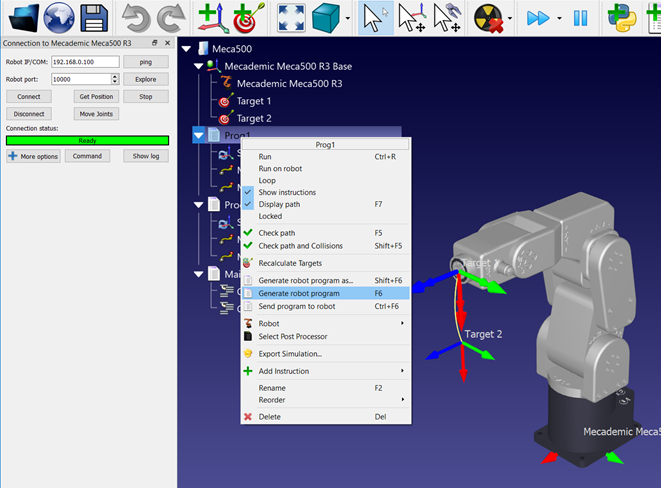
Le programme sera affiché dans un éditeur de texte (ce comportement peut être modifié dans le menu : Outils➔ Options➔ Programme).
Comment charger un fichier script
Une fois que vous avez obtenu un fichier programme/script, vous pouvez exécuter le programme ou le charger sur le contrôleur à l'aide de l'interface web. Suivez les étapes suivantes pour exécuter le programme à l'aide de l'interface web Mecademic :
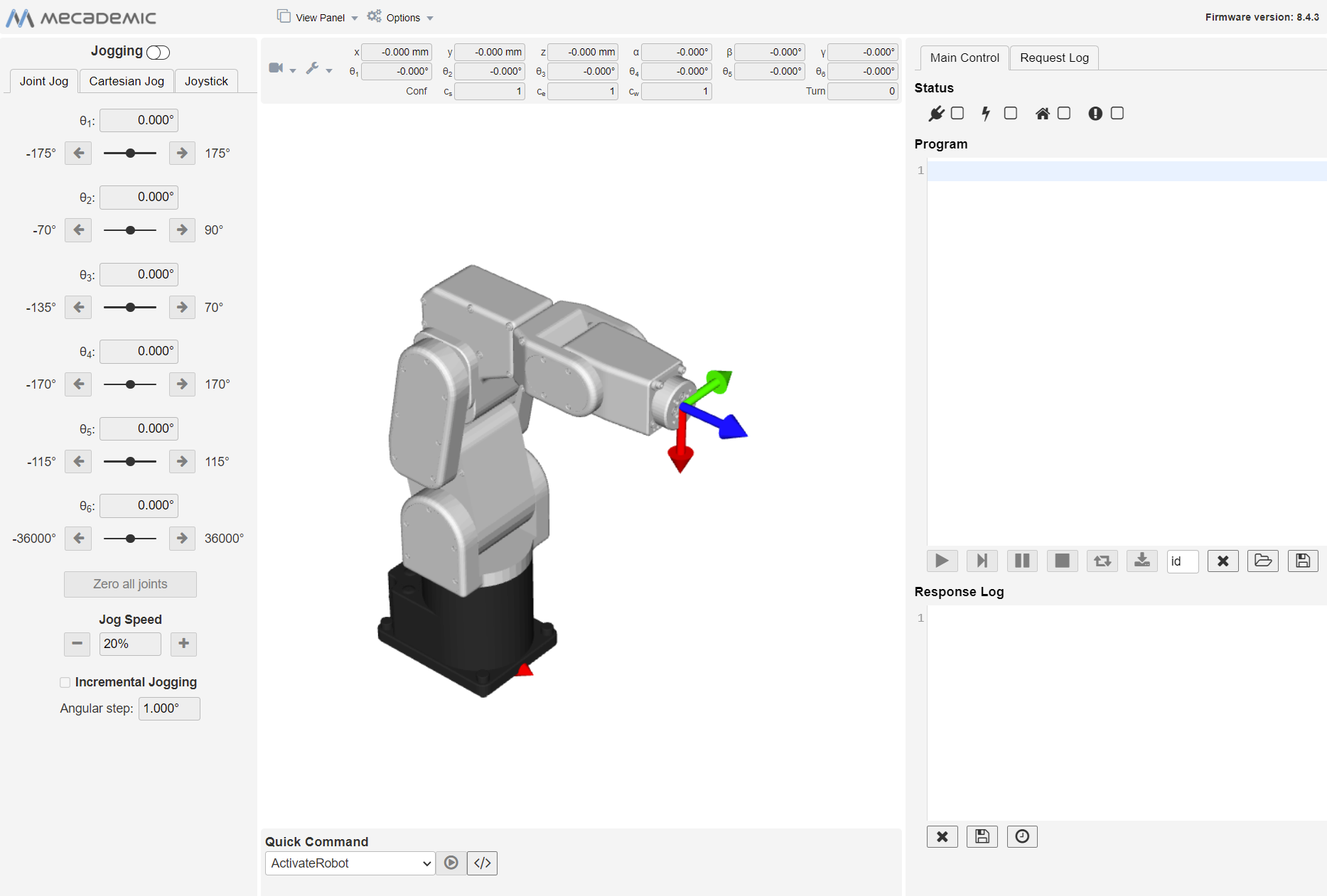
1.Ouvrez l'interface web de Mecademic sur votre navigateur web (tapez l'adresse IP du robot).
2.Copiez et collez le contenu du script dans l'éditeur de programme.
3.Dans la barre d'état, connectez, activez et faites rentrer votre robot à la maison.
4.Cliquez sur le bouton de lecture pour exécuter le programme.
5.Cliquez sur le bouton d'enregistrement pour télécharger le programme vers le robot.
Comment exécuter un fichier PY
Vous pouvez générer un fichier CDO qui se connecte automatiquement au robot Mecademic à l'aide de l'interface CDO/IP Mecademic et exécute le programme à distance.
Vous devez sélectionner le post-processeur appelé Mecademic Python. Les étapes suivantes résument la procédure d'exécution d'un fichier PY sur le Mecademic.
1.Cliquez avec le bouton droit de la souris sur le programme et sélectionnez "Select Post Processor".
2.Sélectionnez Mecademic Python
3.Cliquez avec le bouton droit de la souris sur le programme et sélectionnez Générer un programme de robot (F6).
4.Enregistrez le fichier PY généré sur le disque.
5.Ouvrez et exécutez le fichier PY dans votre IDE ou exécutez-le directement depuis votre environnement python.