Exécuter un programme depuis RoboDK
Les pilotes de robots offrent une alternative à la programmation hors ligne (où un programme est généré, puis transféré au robot et exécuté). Vous pouvez exécuter une simulation à partir de RoboDK directement sur le robot (programmation en ligne). Pour plus d'informations, consultez la section Pilotes de robot.
Procédez comme suit pour vous connecter au robot à partir de RoboDK :
1.Cliquez avec le bouton droit de la souris sur le robot dans RoboDK.
2.Sélectionnez : 
3.Entrez l'IP du robot
4.Sélectionnez Connecter.
Un message vert doit s'afficher Ready si la connexion a réussi.
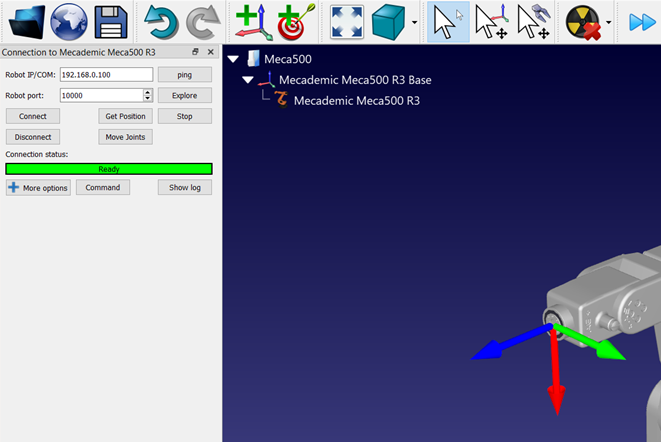
Le robot peut être déplacé en sélectionnant Obtenir les articulations du robot, Déplacer les articulations, dans le menu Connexion.
Il existe deux méthodes différentes pour exécuter le programme du PC vers le robot :
1.Exécuter sur le robot étape par étape avec retour d'information dans RoboDK (Programmation en ligne) :
Cette méthode utilise le robot comme serveur et chaque instruction est envoyée au robot étape par étape au fur et à mesure qu'elle est exécutée dans le simulateur. Cette méthode est utile pour le débogage.
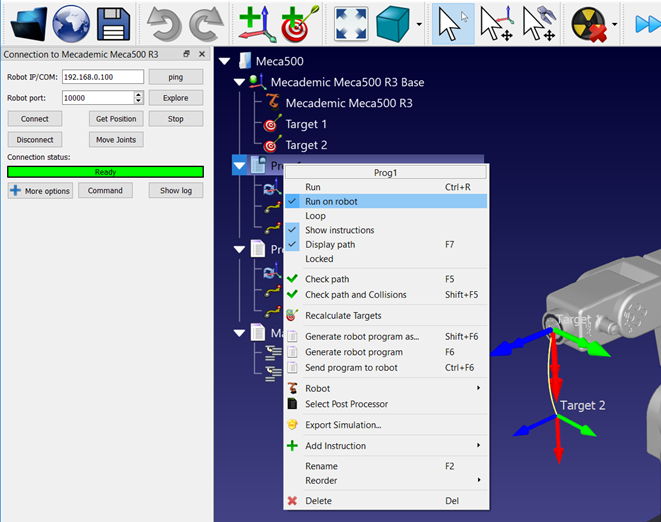
a.Cliquez avec le bouton droit de la souris sur le programme (Print3D dans cet exemple).
b.Sélectionnez Exécuter sur le robot
c.Double-cliquez sur le programme pour le démarrer (ou cliquez avec le bouton droit de la souris et sélectionnez Exécuter).
Une fois cette option cochée, le robot se connectera au robot réel chaque fois que vous double-cliquerez sur un programme (ou que vous cliquerez avec le bouton droit de la souris, puis que vous sélectionnerez l'option Exécuter).
Ces opérations sont également disponibles à partir de l'API RoboDK et permettent d'intégrer la programmation de robots à d'autres applications. L'API est disponible en Python, C# et d'autres langages de programmation.
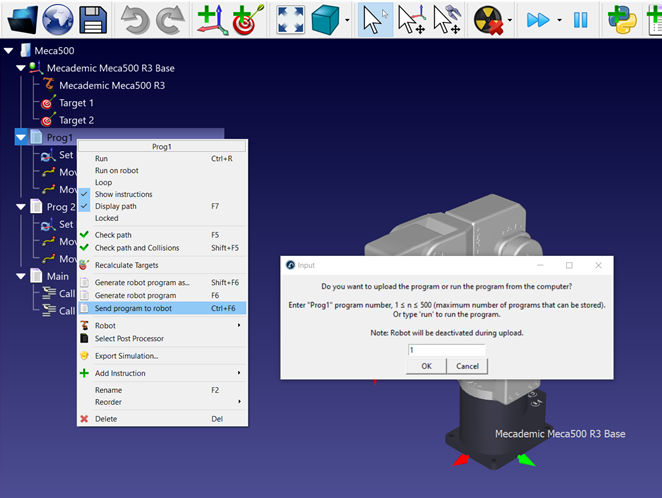
2.Envoyez le programme au robot à l'aide des post-processeurs Mecademic. Il peut être utilisé pour exécuter le programme sur le robot en spécifiant "run" comme numéro de programme. Le programme complet peut également être enregistré sur le contrôleur du robot en tant que programme hors ligne (voir Programmation hors ligne du robot) :
a.Cliquez avec le bouton droit de la souris sur le programme (Prog1 dans cet exemple).
b.Sélectionnez Envoyer le programme au robot (Ctrl+F6).