Mécadémique
Vous pouvez programmer les robots Mecademic selon trois méthodes différentes : en utilisant des fichiers de script Mecademic qui s'exécutent sur le contrôleur Mecademic, en utilisant des fichiers PY qui sont exécutés en externe ou en utilisant le pilote RoboDK.
1.Fichiers de script : vous pouvez générer des scripts qui peuvent être chargés sur le contrôleur Mecademic à l'aide de RoboDK. Pour ce faire, vous utilisez le post-processeur par défaut utilisé pour les robots Mecademic. Vous pouvez copier directement les programmes de script en utilisant l'interface web de Mecademic.
2.Fichiers PY : Vous pouvez générer un fichier Python qui se connecte automatiquement au robot Mecademic à l'aide de l'interface Mecademic et qui exécute le programme à distance. Vous devez sélectionner le post-processeur appelé Mecademic Python.
3.Programmation en ligne : RoboDK peut télécharger votre programme en tant que programme hors ligne (jusqu'à 500) dans la mémoire du robot. Ces programmes hors ligne peuvent être appelés à partir de n'importe quelle autre méthode.
Avec RoboDK, vous pouvez générer des programmes hors ligne, des fichiers de scripts et des fichiers PY qui peuvent être exécutés par un robot Mecademic. De plus, il est possible d'exécuter des programmes sur le robot à partir de RoboDK si le robot est connecté à l'ordinateur.
Récupérez le robot Mecademic IP
Vous avez besoin de l'IP de votre robot Mecademic pour exécuter ou transférer des programmes depuis RoboDK. Les robots Mecademic utilisent l'IP 192.168.0.100 par défaut. Vous pouvez vous assurer que l'IP de votre robot est correcte en entrant l'IP dans un navigateur pour accéder à l'interface web
Assurez-vous d'avoir correctement configuré une connexion réseau si vous ne parvenez pas à voir l'interface Web du robot, comme le montre l'image suivante.
Exécutez un programme sur le contrôleur Mecademic
Une fois que votre simulation RoboDK est prête, vous pouvez générer un programme hors ligne qui peut être exécuté par le contrôleur de robot Mecademic (fichier script). Vous pouvez également générer un fichier PY qui exécutera le programme sur le contrôleur du robot à partir d'un ordinateur distant.
Procédez comme suit pour générer un programme hors ligne (un script ou un fichier PY) à partir de votre simulation de robot :
1.Cliquez avec le bouton droit de la souris sur un programme (Prog1 dans cet exemple).
2.Sélectionnez Générer un programme robot F6
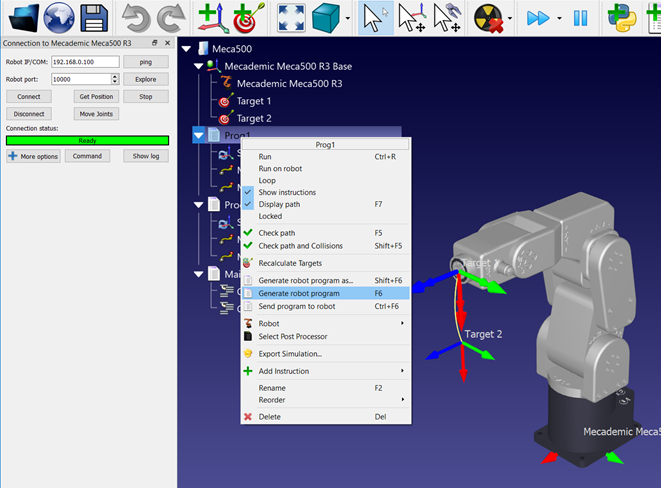
Le programme sera affiché dans un éditeur de texte (ce comportement peut être modifié dans le menu : Outils➔ Options➔ Programme).
Comment charger un fichier script
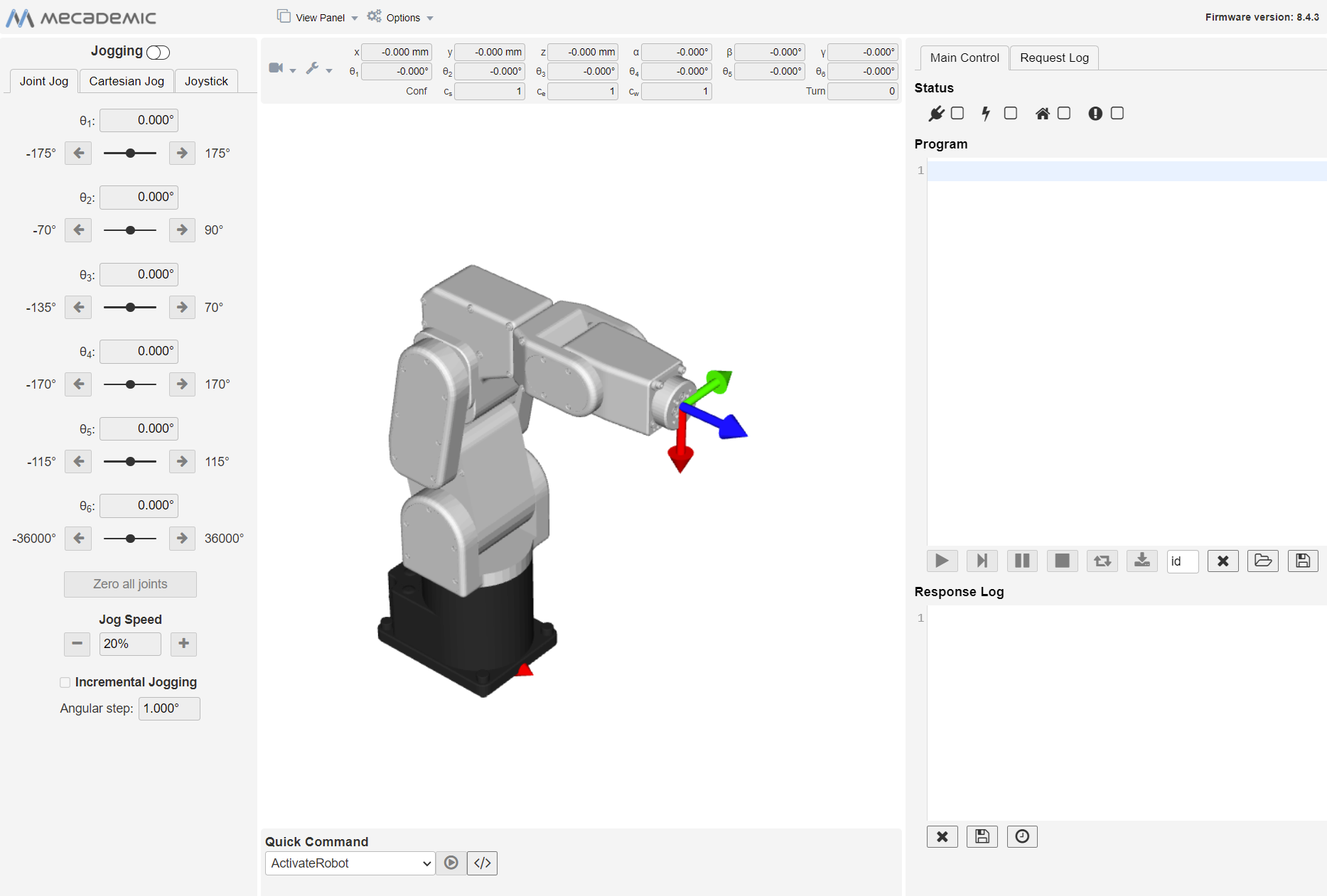
Une fois que vous avez obtenu un fichier programme/script, vous pouvez exécuter le programme ou le charger sur le contrôleur à l'aide de l'interface web. Suivez les étapes suivantes pour exécuter le programme à l'aide de l'interface web Mecademic :
1.Ouvrez l'interface web de Mecademic sur votre navigateur web (tapez l'adresse IP du robot).
2.Copiez et collez le contenu du script dans l'éditeur de programme.
3.Dans la barre d'état, connectez, activez et faites rentrer votre robot à la maison.
4.Cliquez sur le bouton de lecture pour exécuter le programme.
5.Cliquez sur le bouton d'enregistrement pour télécharger le programme vers le robot.
Comment exécuter un fichier PY
Vous pouvez générer un fichier CDO qui se connecte automatiquement au robot Mecademic à l'aide de l'interface CDO/IP Mecademic et exécute le programme à distance.
Vous devez sélectionner le post-processeur appelé Mecademic Python. Les étapes suivantes résument la procédure d'exécution d'un fichier PY sur le Mecademic.
1.Cliquez avec le bouton droit de la souris sur le programme et sélectionnez "Select Post Processor".
2.Sélectionnez Mecademic Python
3.Cliquez avec le bouton droit de la souris sur le programme et sélectionnez Générer un programme de robot (F6).
4.Enregistrez le fichier PY généré sur le disque.
5.Ouvrez et exécutez le fichier PY dans votre IDE ou exécutez-le directement depuis votre environnement python.
Exécuter un programme depuis RoboDK
Les pilotes de robots offrent une alternative à la programmation hors ligne (où un programme est généré, puis transféré au robot et exécuté). Vous pouvez exécuter une simulation à partir de RoboDK directement sur le robot (programmation en ligne). Pour plus d'informations, consultez la section Pilotes de robot.
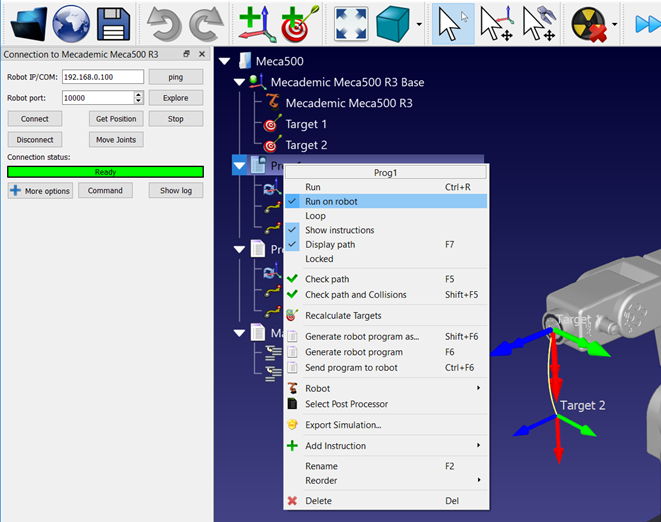
Procédez comme suit pour vous connecter au robot à partir de RoboDK :
1.Cliquez avec le bouton droit de la souris sur le robot dans RoboDK.
2.Sélectionnez : 
3.Entrez l'IP du robot
4.Sélectionnez Connecter.
Un message vert doit s'afficher Ready si la connexion a réussi.
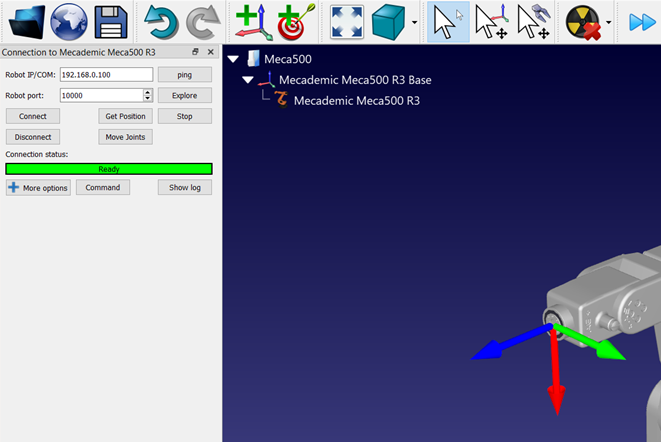
Le robot peut être déplacé en sélectionnant Obtenir les articulations du robot, Déplacer les articulations, dans le menu Connexion.
Il existe deux méthodes différentes pour exécuter le programme du PC vers le robot :
1.Exécuter sur le robot étape par étape avec retour d'information dans RoboDK (Programmation en ligne) :
Cette méthode utilise le robot comme serveur et chaque instruction est envoyée au robot étape par étape au fur et à mesure qu'elle est exécutée dans le simulateur. Cette méthode est utile pour le débogage.
a.Cliquez avec le bouton droit de la souris sur le programme (Print3D dans cet exemple).
b.Sélectionnez Exécuter sur le robot
c.Double-cliquez sur le programme pour le démarrer (ou cliquez avec le bouton droit de la souris et sélectionnez Exécuter).
Une fois cette option cochée, le robot se connectera au robot réel chaque fois que vous double-cliquerez sur un programme (ou que vous cliquerez avec le bouton droit de la souris, puis que vous sélectionnerez l'option Exécuter).
Ces opérations sont également disponibles à partir de l'API RoboDK et permettent d'intégrer la programmation de robots à d'autres applications. L'API est disponible en Python, C# et d'autres langages de programmation.
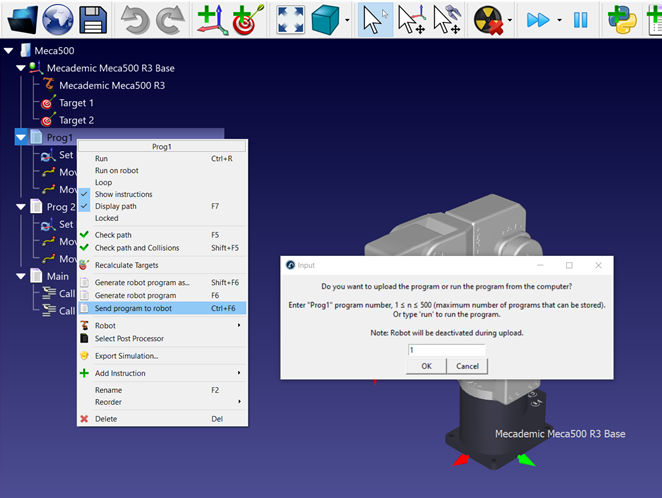
2.Envoyez le programme au robot à l'aide des post-processeurs Mecademic. Il peut être utilisé pour exécuter le programme sur le robot en spécifiant "run" comme numéro de programme. Le programme complet peut également être enregistré sur le contrôleur du robot en tant que programme hors ligne (voir Programmation hors ligne du robot) :
a.Cliquez avec le bouton droit de la souris sur le programme (Prog1 dans cet exemple).
b.Sélectionnez Envoyer le programme au robot (Ctrl+F6).
Autres conseils
Cette section fournit d'autres informations utiles pour la programmation des robots Mecademic Meca500.
Programmes hors ligne
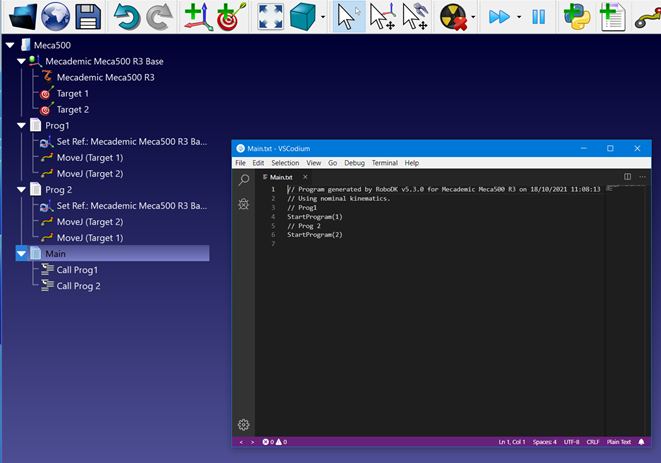
Les programmes hors ligne sont persistants sur le robot et peuvent être appelés à l'aide de leur numéro de programme respectif. Vous pouvez automatiser la sélection du numéro de programme en l'ajoutant au nom du programme.
RoboDK récupérera automatiquement l'ID et l'utilisera pour appeler le programme. Ceci s'applique également aux sous-programmes, voir l'exemple ci-dessous.
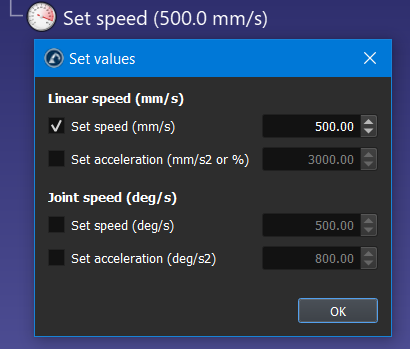
Unités de vitesse
Les unités de vitesse et d'accélération linéaire et articulaire des robots Mecademic doivent être indiquées en pourcentage (%), contrairement aux autres unités affichées dans le menu d'instructions de vitesse.
La vitesse linéaire est correcte et doit être indiquée en mm/s.