Drivers RoboDK pour Yaskawa Motoman
Les pilotes de robot offrent une alternative à la programmation hors ligne. Avec les pilotes Yaskawa/Motoman, vous pouvez déplacer un robot directement depuis RoboDK pendant que vous simulez votre programme (programmation en ligne). Plus d’informations disponibles dans la section Drivers/Pilotes de robot.
Depuis la version 3.8.0 de RoboDK, il est possible de vous connecter directement au robot en utilisant le protocole High-Speed Ethernet Server (HSE). Cette option est disponible par défaut avec les récents contrôleurs de robot Yaskawa. Ce protocole vous permet de déplacer et de surveiller le robot à partir d’un ordinateur à une fréquence de rafraîchissement de 70 Hz.
Sélectionner Connecter ➔ Connecter Robot, entrer l’adresse IP du robot et sélectionner Connecter (vous pouvez ignorer le port). Assurez-vous d’utiliser le dernier chemin de pilote qui prend en charge le protocole HSE (Motomanhse).
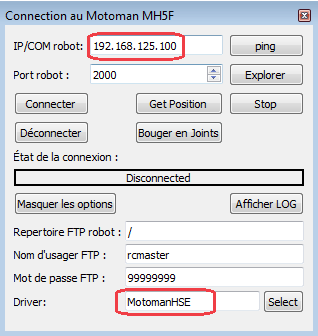
Pour activer ce mode de fonctionnement sur le robot, mettre simplement le Teach Pendant en mode Remote.

Cela permet d’utiliser l’option RoboDK Run on robot pour la programmation et le débogage en ligne. La connexion peut être établie via une connexion Ethernet standard (TCP/IP - UDP).
Les contrôleurs suivants fonctionnent avec le pilote de serveur Ethernet haute vitesse :
●DX100
●DX200
●FS100
●NX100
●YR1000
Une connexion entre RoboDK et n’importe quel robot Motoman peut être établie pour déplacer le robot automatiquement à partir d’un PC connecté en utilisant l’option logicielle RoboDK et Motoman Motocom.
Cette étape est automatique et il n’est pas nécessaire de mettre en place quelque chose de spécifique côté robot.