Mettre à jour l’information Impulsion par degré
Les robots Yaskawa Motoman ont besoin des impulsions par degré pour chaque articulation afin de convertir les positions angulaires en impulsions et vice-versa. RoboDK génère automatiquement des programmes avec les informations d’impulsion correctes si le rapport d’impulsions par degré est fourni dans les paramètres du robot.
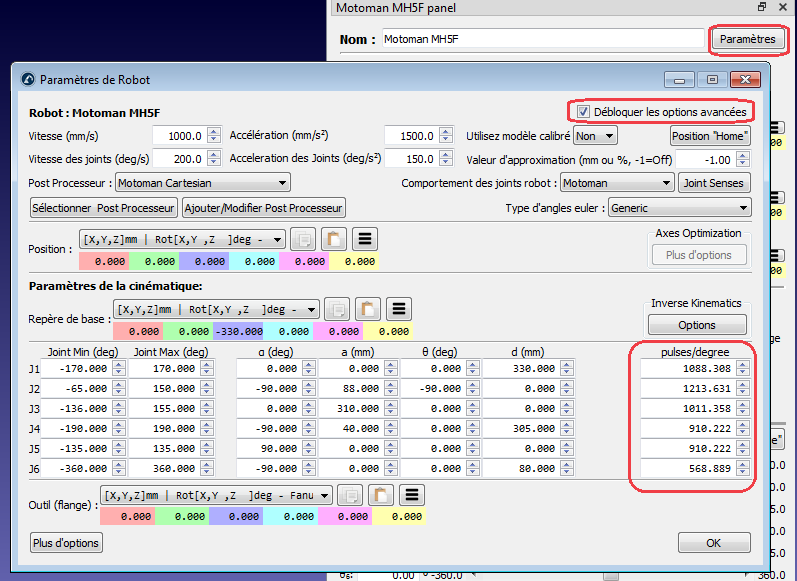
Suivre ces étapes pour vérifier si ces informations sont disponibles pour votre robot (ou pour les mettre à jour) :
1.Double-cliquer sur le robot Yaskawa Motoman dans RoboDK
2.Sélectionner Paramètres
3.Sélectionner Débloquer les options avancées
4.Examiner ou mettre à jour les valeurs d’impulsions/degré pour chaque Joint.
Une fois cette information mise à jour, vous pouvez générer vos programmes avec les bonnes informations d’impulsions/degrés.