Configuration du nœud d'écoute
Vous pouvez exécuter des programmes sur votre robot Omron-TM directement à partir de RoboDK en utilisant le pilote RoboDK pour Omron-TM. Vous pouvez également générer des programmes sous forme de fichiers de script qui sont diffusés via le protocole CDO. Dans les deux cas, vous devez vous assurer que le robot se trouve dans un nœud d'écoute. Cette section décrit comment configurer la communication dans RoboDK et sur le robot Omron-TM.
Il est possible de choisir parmi différents post-processeurs ou de personnaliser les post-processeurs pour définir la manière dont les programmes sont générés hors ligne et exécutés (par exemple, pour prendre en charge une pince ou des capteurs externes).
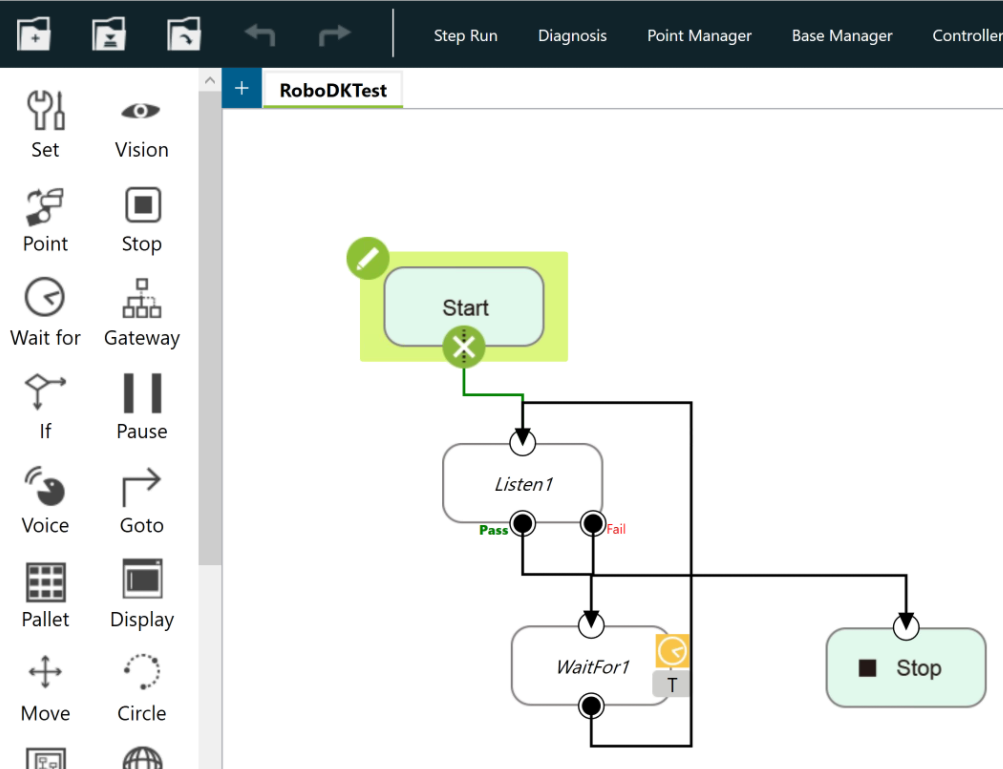
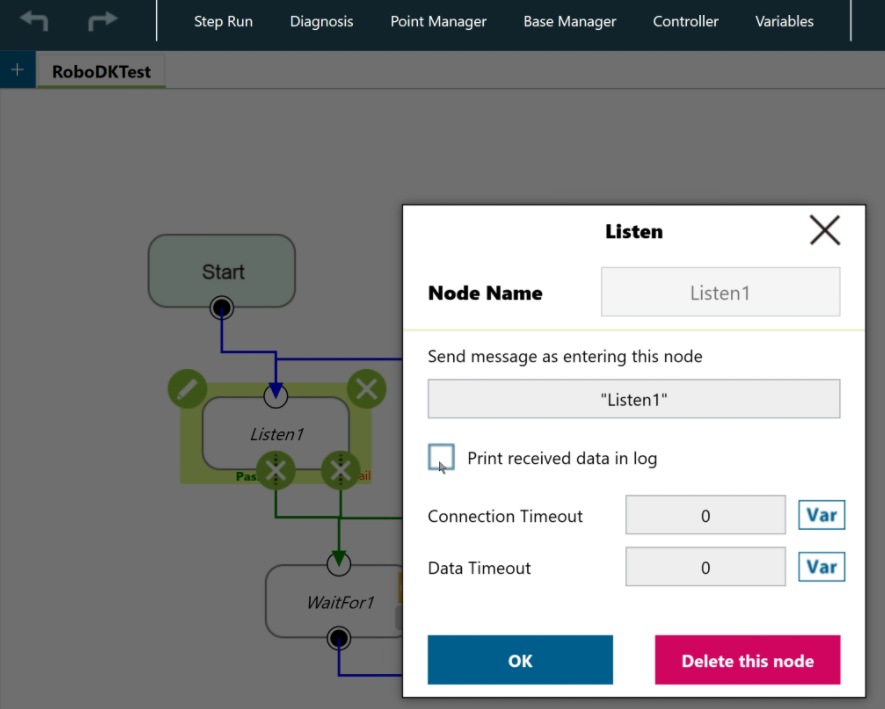
Pour que le robot puisse se déplacer à distance, il doit être en mode d'écoute. Pour ce faire, vous devez utiliser un nœud d'écoute. L'image suivante montre une suggestion de flux de travail de programme pour avoir un programme qui exécute automatiquement le programme envoyé par RoboDK. Il est recommandé de sélectionner Imprimer les données reçues dans le journal pour résoudre les problèmes.
Suivez ces étapes pour configurer la communication dans RoboDK et exécuter un programme :
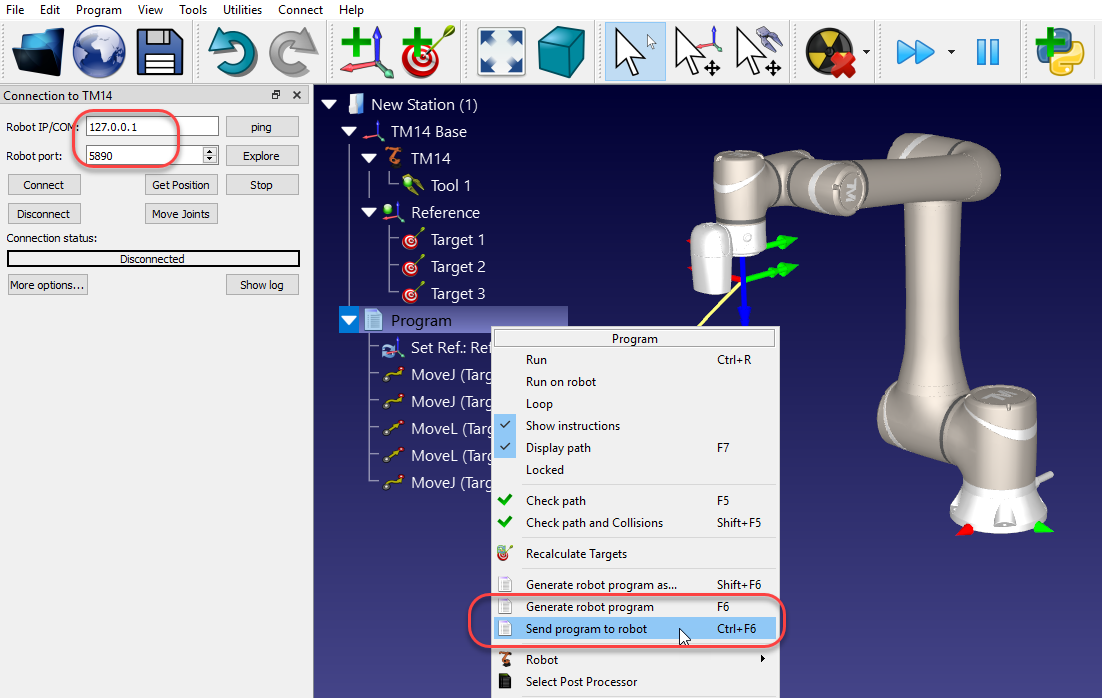
1.Sélectionnez Connect➔ Connecter le robot
2.Saisissez l'IP du robot
3.Entrez le port 5890
4.Cliquez avec le bouton droit de la souris sur votre programme
5.Sélectionnez Générer un programme robot F6.