Transférer un fichier via USB
En utilisant le post-processeur par défaut, vous obtiendrez votre programme sous la forme d'un fichier ZIP. Vous devez préparer une clé USB présentant les caractéristiques suivantes pour charger correctement le fichier sur le robot :
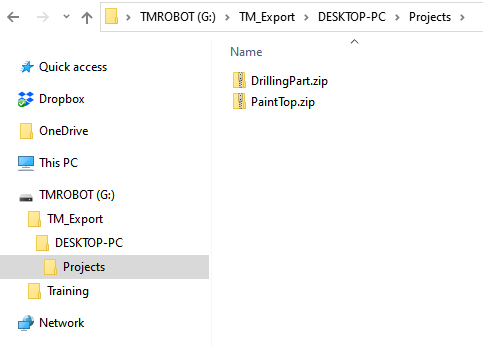
1.Nommez la clé USB TMROBOT (cette étape est importante).
2.Créez un nouveau dossier appelé TM_Export à la racine de votre disque.
3.Créez un nouveau dossier à l'intérieur de TM_Export avec votre projet (n'importe quel nom devrait fonctionner).
4.Créez un nouveau dossier appelé Projects à l'intérieur du dossier précédent.
5.Placez les programmes ZIP dans le dossier Projects.
Procédez comme suit pour charger le programme dans TMFlow :
1.Enregistrez le fichier ZIP créé à partir de RoboDK sur la clé USB dans le dossier en suivant les étapes précédentes.
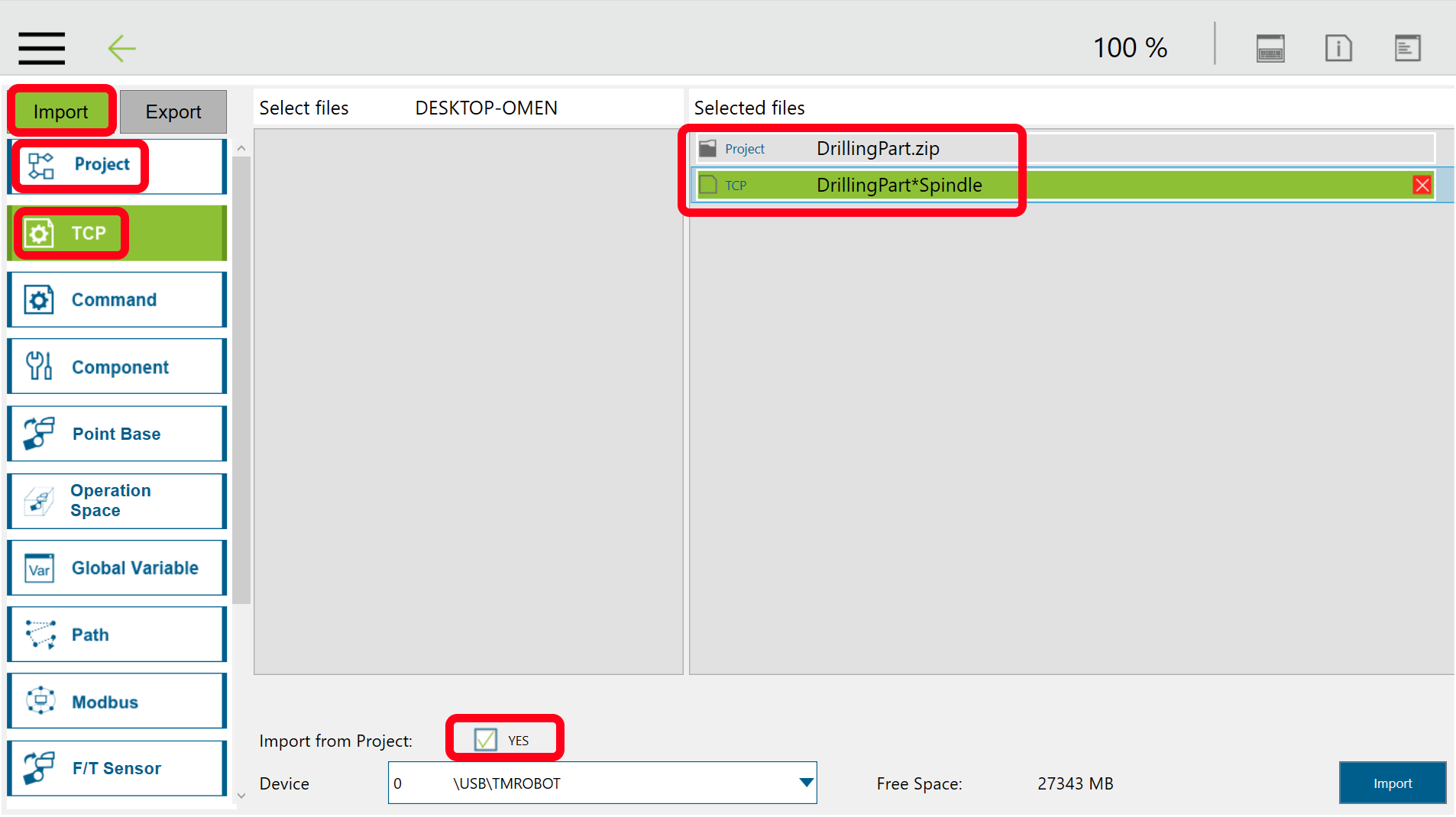
2.Sélectionnez le menu principal➔ Système➔ Import/Export
3.Sélectionnez Importer et sélectionnez votre dossier dans TM_Export.
4.Sélectionnez le projet et choisissez le(s) programme(s) ZIP.
5.Sélectionnez CDO
6.Cochez l'option Importer du projet➔ Oui
7.Sélectionnez votre programme et sélectionnez les outils dans votre programme pour vous assurer que vous les chargez.
8.Sélectionnez Importation
Votre programme sera désormais disponible lorsque vous choisirez d'ouvrir de nouveaux programmes.