Exécuter un programme depuis RoboDK
Les pilotes de robot fournissent une alternative à la programmation hors ligne (où un programme est généré, puis, transféré au robot et exécuté). Vous pouvez exécuter une simulation à partir de RoboDK directement sur le robot (Programmation en ligne). Plus d’informations disponibles dans la section Pilotes de robot.
Suivre ces étapes pour vous connecter au robot depuis RoboDK :
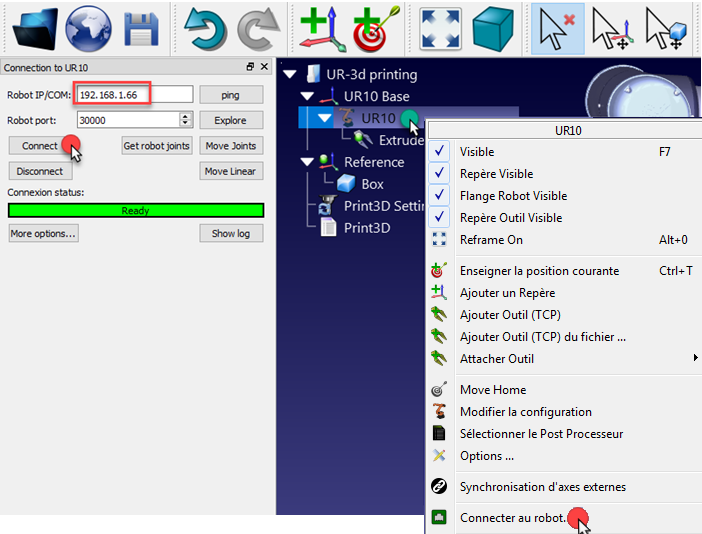
1.Faire un clic droit sur le robot dans RoboDK
2.Sélectionner : 
3.Entrer l’adresse IP du robot
4.Sélectionner Connecter.
Il devrait y avoir un message vert affichant Ready si la connexion a réussi.
Le robot peut être déplacé en sélectionnant Get robot joints, Move Joints et Move Linear, dans le menu de connexion.
Il existe deux méthodes différentes pour exécuter le programme du PC au robot :
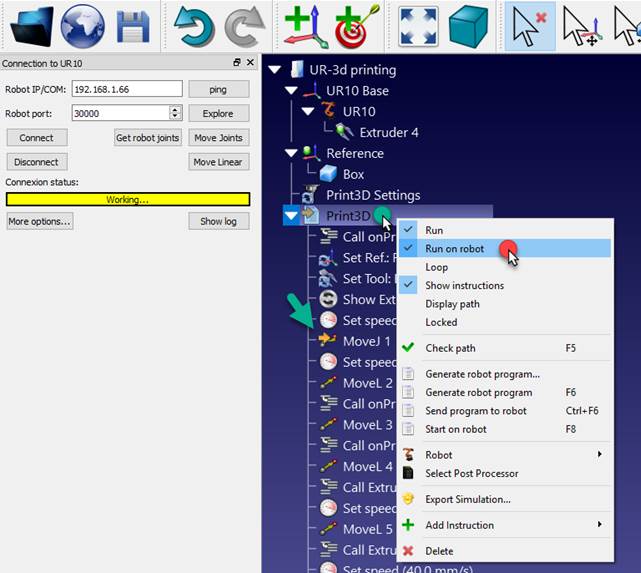
1.Exécuter au robot étape par étape avec les retours dans RoboDK (programmation en ligne) :
Cette méthode utilise le robot comme serveur et chaque instruction est envoyée au robot étape par étape au fur et à mesure qu’elle est exécutée dans le simulateur. Cette méthode est utile pour le débogage.
a.Faire un clic droit sur le programme (Print3D dans cet exemple)
b.Sélectionner Exécuter au robot
c.Double-cliquer le programme pour démarrer (ou clic droit et sélectionner Exécuter)
Une fois cette option cochée, il se connectera au robot chaque fois que vous double-cliquer sur un programme (ou clic droit, puis, sélectionner Exécuter)
Ces opérations sont également disponibles à partir de l’API RoboDK et il permet d’intégrer la programmation robot avec d’autres applications. L’API est disponible en Python et C# et dans d’autres langages de programmation
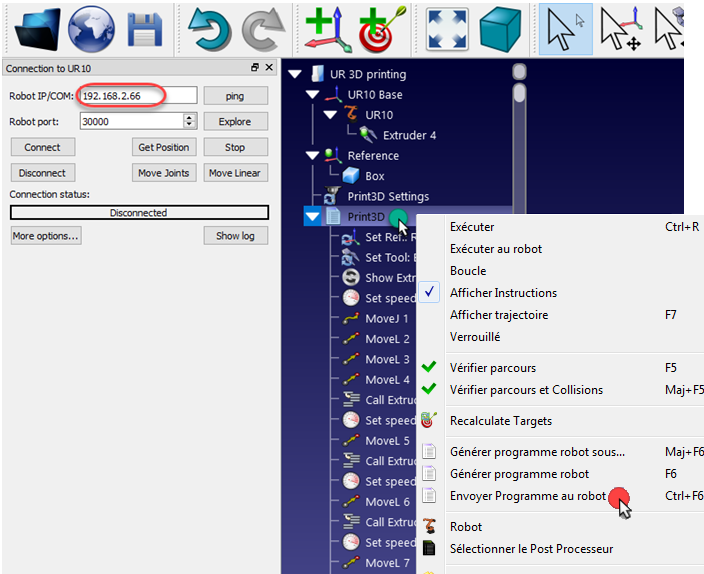
2.Envoyer programme au robot génère le programme complètement, le transfert au robot et démarre le programme sur le robot. (Programmation Robot Hors Ligne) :
a.Faire un clic droit sur le programme (Print3D dans cet exemple)
b.Sélectionner Envoyer programme au robot (Ctrl+F6).
Comment autoriser le contrôle à distance sur un URe
Activer l’option de commande à distance sur le contrôleur de robot UR si vous avez un robot URe (Ur3e, Ur5e ou Ur10e).
Suivre ces étapes pour activer le contrôle à distance sur un URe :
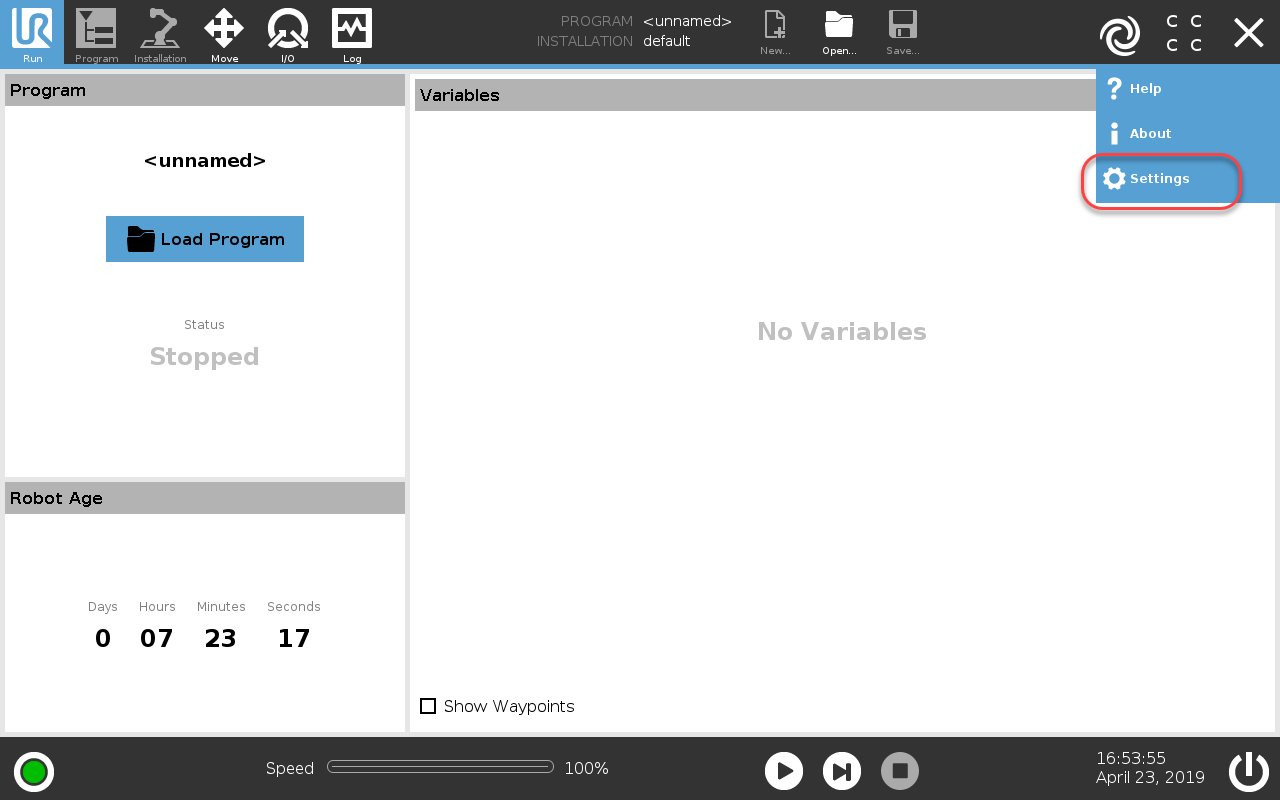
1.Sélectionner le bouton menu Settings situé dans le coin en haut à droite
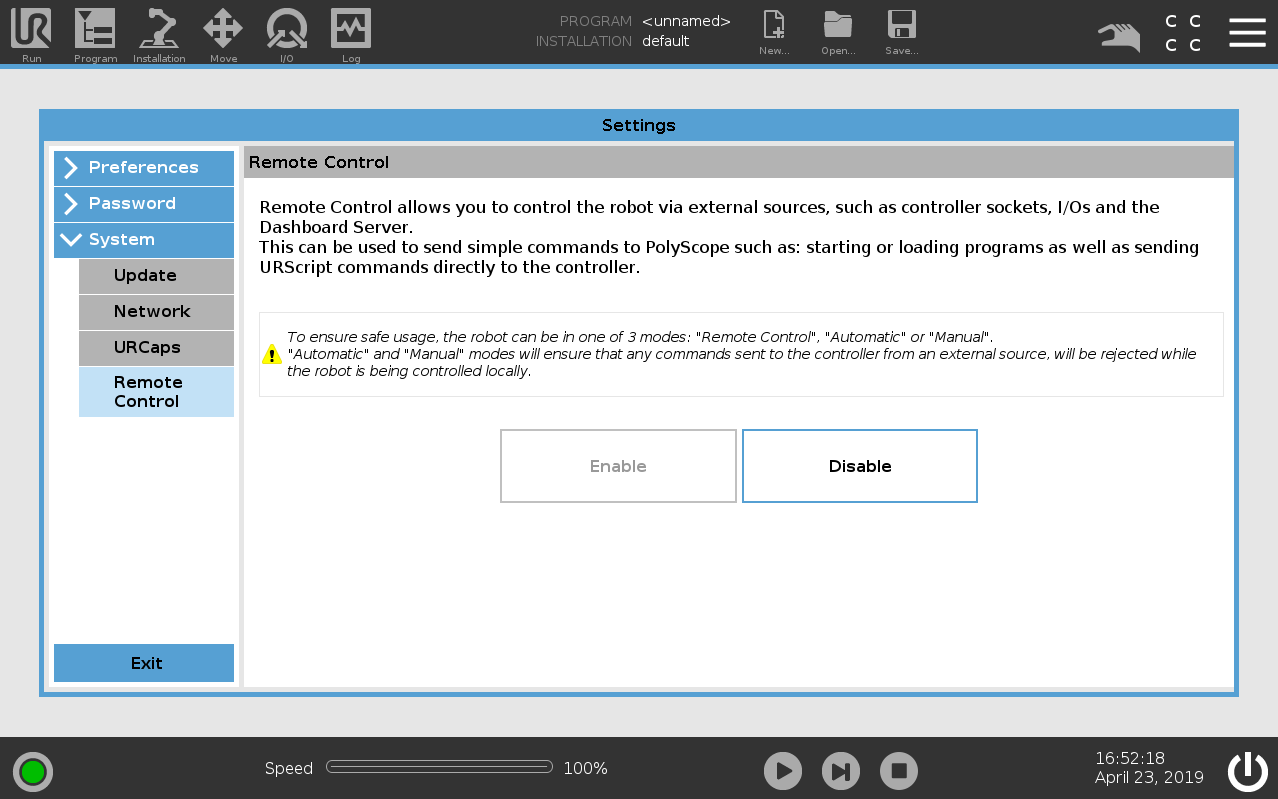
2.Sélectionner System-Remote Control
3.Sélectionner Enable
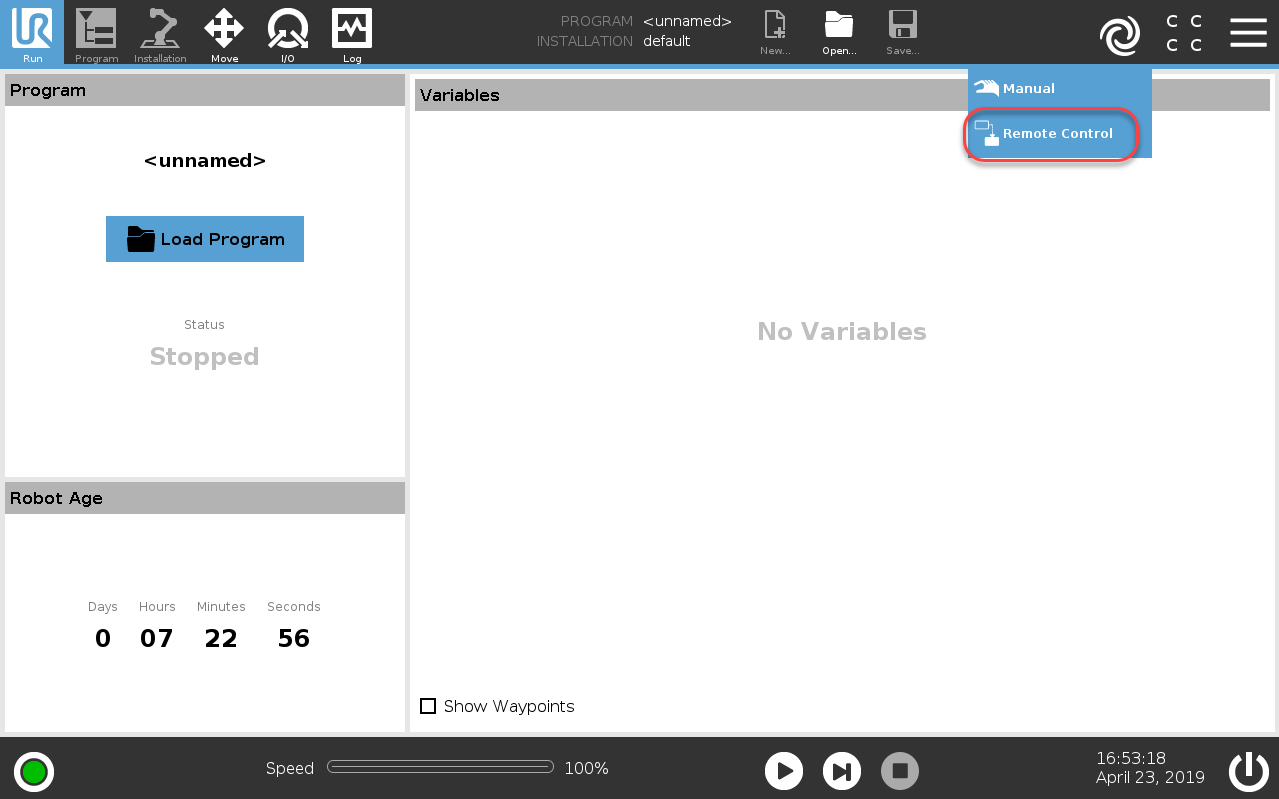
4.Changer le mode d’opération à Remote Control