Mettre à jour la cinématique Robot
Les étapes de cette section sont facultatives et ne sont exigées que dans certaines circonstances lorsque la précision est requise dans la programmation hors ligne. Cette section explique comment saisir les valeurs cinématiques uniques du robot UR dans RoboDK pour simuler avec précision le robot
La cinématique du contrôleur UR est unique pour chaque robot. Les cinématiques sont les dimensions qui définissent le robot sous la forme de la table DH (Denavit Hartenberg). Le simulateur RoboDK utilise la cinématique UR nominale par défaut, par conséquent, vous pouvez voir de 2 mm à 10 mm d’écart entre la cinématique du simulateur et la cinématique du contrôleur.
Pour que la simulation corresponde au vrai robot, vous pouvez importer la cinématique spécifique au robot UR en suivant cette procédure :
1.Récupérer un fichier URP généré à l’aide du robot réel (sans utiliser RoboDK ou le simulateur UR)
2.Ouvrir votre robot dans RoboDK. Vous trouvez votre robot UR dans la bibliothèque RoboDK. Il est possible également d’utiliser un robot UR disponible dans l’une de vos stations RoboDK existantes.
3.Sélectionner Outils ➔ Run Script (Maj+S)
4.Sélectionner UR_LoadControllerKinematics
5.Sélectionner le fichier URP extrait du contrôleur robot.
Vous voyez un message comme indiqué dans l’image suivante. Vous pouvez voir un message d’avertissement si vous n’avez pas chargé un fichier URP valide ou si vous n’avez pas sélectionné le robot UR approprié.
Lorsque cette procédure est terminée, faire un clic droit sur un robot et sélectionner Enregistrer sous… Ces paramètres sont enregistrés avec le fichier robot et vous pouvez utiliser le fichier robot au lieu de répéter cette procédure pour chaque nouveau projet
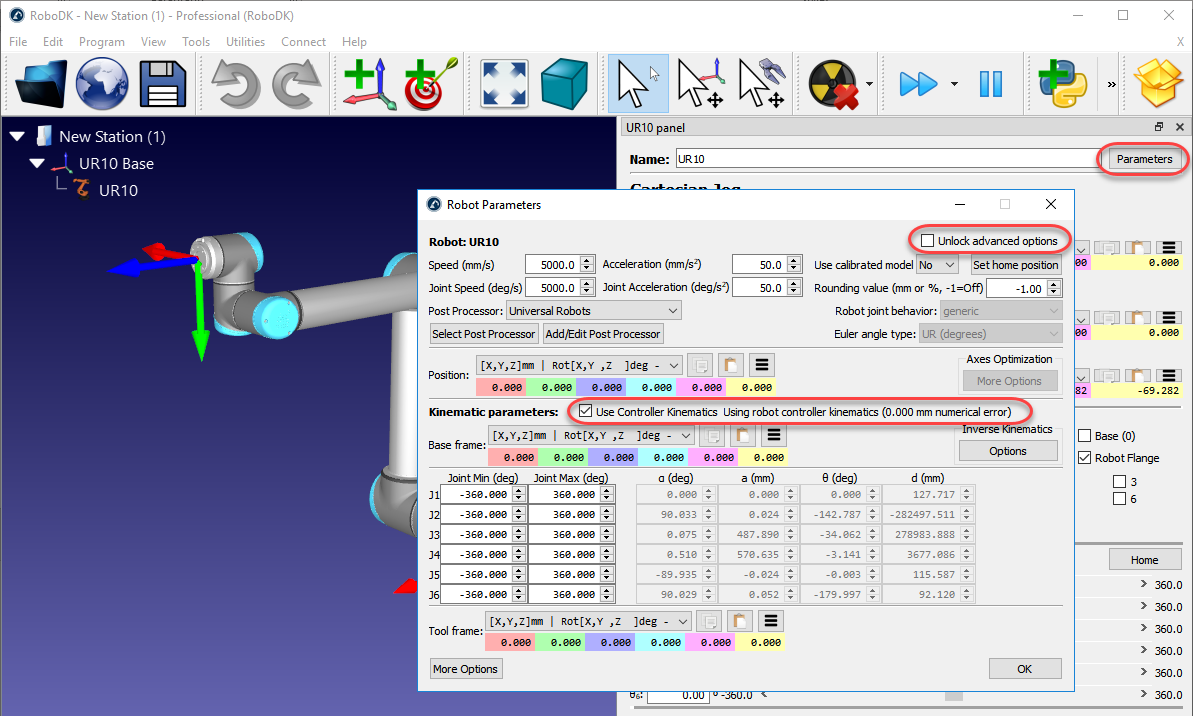
RoboDK extrait les informations spécifiques à votre robot du fichier URP et les prend en compte pour la simulation et la programmation hors ligne dans le fichier robot. Il est possible de modifier ce paramètre et revenir à la cinématique par défaut dans le menu des paramètres du robot comme le montre l’image suivante.
Vous remarquerez que les informations de Pose affichées sur le teach pendant correspondent à la cinématique affichée dans RoboDK (assurez-vous de supprimer le repère de l’outil et le repère de référence sur RoboDK et le robot UR pour effectuer la comparaison).
La cinématique UR passe d’un robot à un autre car chaque robot est calibré en usine par UR. D’autres vendeurs de robots tels que KUKA, ABB, Motoman ou Fanuc ne calibrent pas leurs robots (sauf avec l’option dite de précision absolue). Les options de précision absolue peuvent prendre en compte jusqu’à 40 paramètres d’étalonnage ou plus
Cette procédure n’est pas la même que celle expliqué dans l’étalonnage de robot avec Robodk. L’étalonnage du robot contribue à améliorer la précision du robot.