Calibration des paramètres du robot
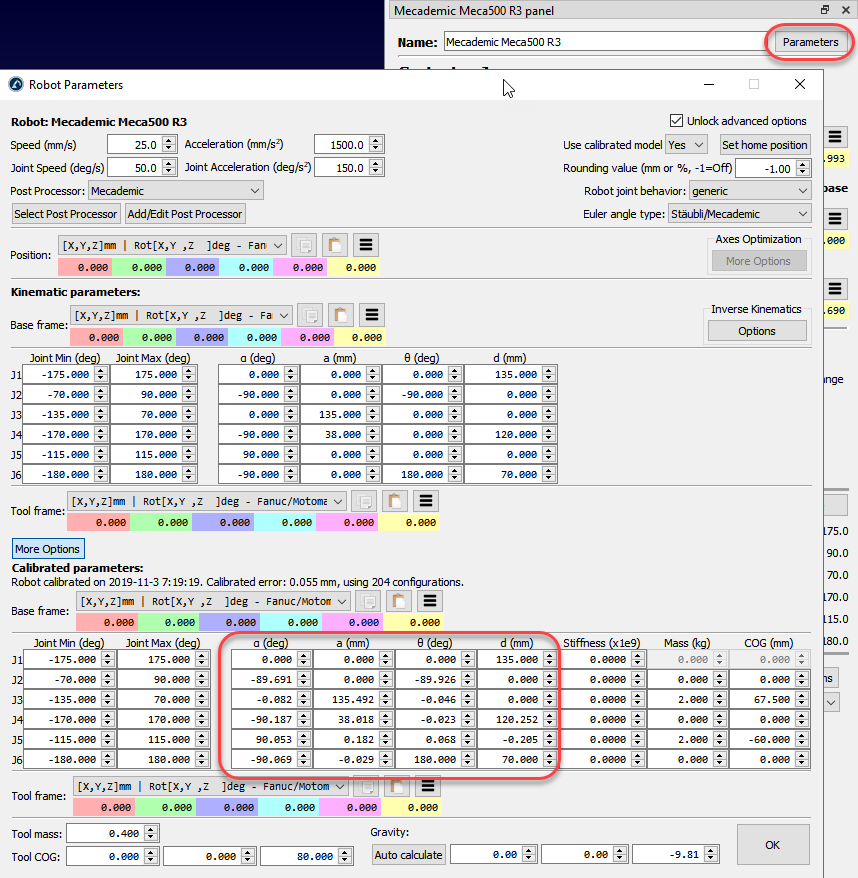
Une fois le robot calibré, vous pouvez accéder aux paramètres de calibration dans le menu Paramètres. Certains contrôleurs de robot permettent de modifier certains paramètres du robot.
Note : RoboDK utilise la convention Denatit-Hartenberg Modified. Veillez à utiliser tous les paramètres sélectionnés/calibrés.
Important : Nous devons nous assurer que nous ne générons pas de programmes filtrés si nous mettons à jour les paramètres du contrôleur du robot.