Calibration du système
Cette section vous guidera dans la calibration de votre robot et de la sonde. Cette étape ne doit être réalisée qu'une seule fois, mais elle est importante pour obtenir de bons résultats en termes de précision.
Avant de commencer la calibration, il est recommandé de charger les modèles 3D de votre cellule. Cela vous aidera à éviter automatiquement les collisions pendant le processus de calibration. Si vous ne disposez pas des modèles 3D de chaque composant, vous pouvez simplement charger des boîtes de plan et des sphères pour représenter les zones auxquelles vous ne voulez pas accéder.
Calibration du robot
Cette section décrit comment calibrer automatiquement votre robot à l'aide de RoboDK TwinTrack et de votre système de mesure. La calibration du robot vous permet d'améliorer la précision du robot jusqu'à 0,150 mm lorsque vous générez des programmes hors ligne ou en utilisant les outils d'apprentissage par démonstration TwinTrack dans RoboDK (le niveau de précision dépend fortement de la qualité et de la taille du robot).
Il est recommandé d'effectuer la calibration du robot après la construction de votre cellule robotisée ou après avoir apporté des modifications importantes (comme le changement de la charge utile de votre outil). Cela permet d'obtenir la meilleure précision possible.
Avant de commencer la calibration, vous pouvez modéliser votre cellule dans RoboDK pour éviter automatiquement les collisions. Vous pouvez utiliser des géométries de base telles que des plans ou des cubes pour éviter les zones indésirables. Vous pouvez également limiter l'espace des articulations du robot.
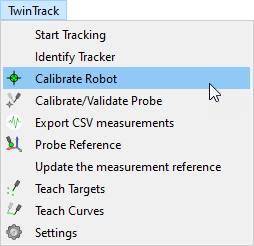
Vous pouvez sélectionner TwinTrack➔ Calibrer le robot pour lancer la procédure de calibrage du robot.
Cette opération vous guidera dans la calibration du robot, y compris la génération automatique de points pour la calibration et la validation. RoboDK peut générer automatiquement des points visibles par le tracker.
La procédure de calibration du robot nécessite la prise d'environ 200 mesures. La procédure commence par des mesures autour de la position initiale du robot
Une fois que la configuration est prête et que la communication avec le robot est correctement établie, la procédure de calibration devrait prendre de 15 à 30 minutes.
Le système ne nécessite pas de dispositifs ou d'accessoires spéciaux, il suit simplement la position de l'outil par rapport à la référence du suiveur.
Il n'y a pas de problème si vous manquez des mesures parce que les cibles ne sont pas visibles.
Calibration du palpeur
Il est important de calibrer correctement le but de votre palpeur et de s'assurer que le palpeur est précise dans les limites des tolérances souhaitées.
La calibration de la pointe du palpeur s'effectue en déplaçant la pointe autour d'un point statique.
Sélectionnez TwinTrack➔ Calibrer/Valider Probe Tip pour lancer la calibration de l'outil.
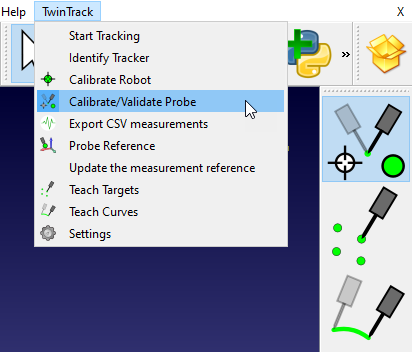
Dans ce cas, comme nous utilisons le HandyProbe de Creaform, vous pouvez calibrer la sonde à l'aide du logiciel VXElements de Creaform et la valider à l'aide de RoboDK.
Pour valider la pointe de votre sonde, il vous suffit de vous déplacer autour d'un point statique et RoboDK affichera la précision.
Programmation hors ligne
Vous pouvez utiliser les fonctions d'apprentissage par démonstration sans robot réel. Cela signifie que vous pouvez simuler et programmer votre robot hors ligne uniquement avec votre système de mesure avant d'avoir accès au robot réel.
Vous avez simplement besoin d'une pièce avec un système de coordonnées bien défini que vous pouvez utiliser comme référence.
Une fois que le système de mesure et votre pièce sont prêts, vous pouvez suivre les étapes suivantes pour définir le système de coordonnées de votre dispositif de mesure :
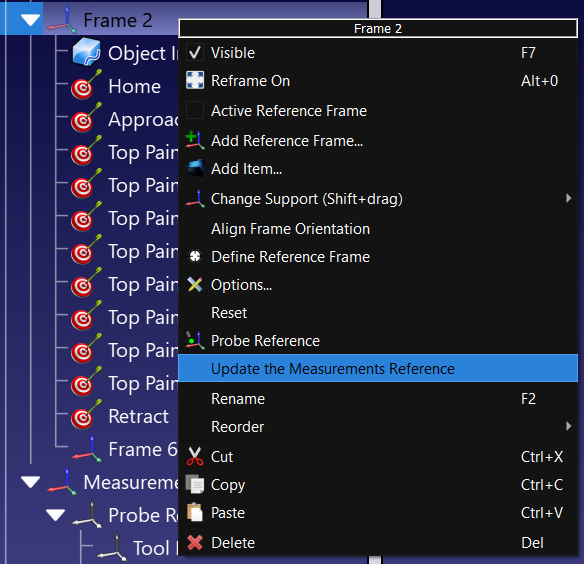
1.Cliquez avec le bouton droit de la souris sur le système de coordonnées de votre pièce (ou sur le système de coordonnées du gabarit auquel elle est attachée).
2.Sélectionnez Mettre à jour la référence des mesures.
3.Suivez les instructions à l'écran pour apprendre 3 points qui définissent le système de coordonnées : l'origine, un point sur X+ et un point sur Y+.
Le système de mesure sera mis à jour en conséquence et vous pourrez procéder à l'apprentissage de points, de courbes ou d'autres systèmes de coordonnées.