Configuration
Pour utiliser le système TwinTrack, vous devez charger votre robot dans RoboDK et vous connecter au robot et au système de mesure. Nous pouvons éventuellement modéliser la cellule en ajoutant les modèles 3D des objets et des outils. Cela permettra d'éviter les collisions.
8.Chargez le robot :
a.Sélectionnez File (Fichier)➔ Open online library (Ouvrir la bibliothèque en ligne). La bibliothèque en ligne apparaît dans RoboDK.
b.Utilisez les filtres pour trouver votre robot.
c.Sélectionnez Télécharger pour charger automatiquement le robot dans votre station RoboDK.
d.Vous pouvez également télécharger le fichier du robot directement à partir de la bibliothèque en ligne (https://robodk.com/library) et ouvrir le fichier avec RoboDK (fichier .robot).
9.Connectez le système de mesure :
a.Connectez le système de mesure à votre ordinateur.
b.Sélectionnez Connecter et connectez-vous à votre système de mesure. Assurez-vous que le logiciel requis est également installé. Il se peut que vous deviez modifier l'IP du tracker en fonction du système de mesure que vous utilisez.
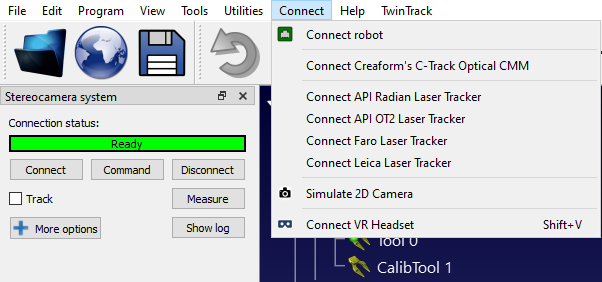
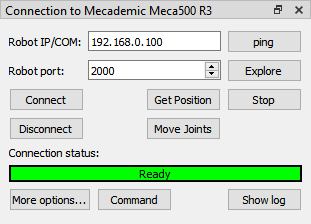
10.Connectez le robot :
a.Sélectionnez Connecter➔ Connecter le robot.
b.Saisissez l'IP et le port du robot.
c.Sélectionnez Connecter.