Enseigner les courbes
Avec RoboDK TwinTrack, vous pouvez créer des parcours ou des courbes de robot manuellement avec votre sonde.
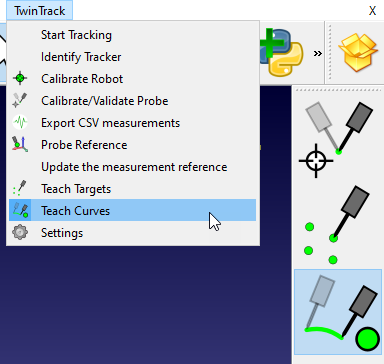
Vous pouvez lancer le mode d'apprentissage des cibles en sélectionnant TwinTrack➔ Enseigner Courbes. Ce bouton est également disponible par défaut dans la barre d'outils de TwinTrack.
RoboDK calcule et affiche la position du robot en temps réel en fonction de la position de votre main. Vous pouvez facilement voir quelles zones sont accessibles à votre robot.
Vous pouvez créer une courbe en maintenant le premier bouton de votre sonde. Une fois que vous souhaitez créer un programme, vous pouvez appuyer sur le deuxième bouton de votre sonde et RoboDK créera et simulera le programme :
●Maintenez le premier bouton enfoncé : enseigner les courbes/les parcours.
●Deuxième bouton : créer et simuler le programme dans RoboDK.
●Maintenez le deuxième bouton enfoncé : exécuter le programme sur le robot.