Enseigner un système de coordonnées
Avec RoboDK TwinTrack, vous pouvez sonder et localiser vos systèmes de coordonnées pour localiser des objets dans l'espace de travail du robot.
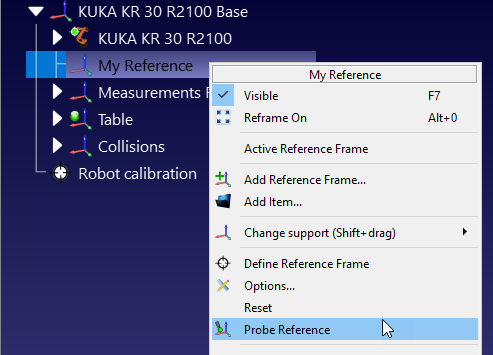
Cliquez avec le bouton droit de la souris sur votre système de coordonnées et sélectionnez Probe Reference.
Vous devez ensuite approfondir 3 points dans l'ordre suivant :
1.Premier point à l'origine.
2.Deuxième point le long de l'axe X positif.
3.Troisième point sur l'axe Y positif.
En définissant correctement votre système de coordonnées, vous pouvez programmer des robots à distance. Par exemple, si vous disposez d'un système de fixation correctement défini, lorsque vous souhaitez programmer une nouvelle pièce, vous pouvez simplement le faire depuis votre bureau ou votre domicile, sans même avoir à vous trouver à proximité de votre robot.