Filtrage des programmes
Une fois le robot calibré, nous devons nous assurer que nous générons des programmes filtrés ou que nous tenons compte des paramètres calibrés du robot afin de tirer parti de la calibration du robot.
Pour programmer les robots avec précision après l'étalonnage, il convient de suivre une et une seule des méthodes suivantes :
1.Utilisez RoboDK pour la programmation hors ligne afin de générer des programmes précis (les programmes générés sont déjà filtrés). Il s'agit de l'option de programmation hors ligne recommandée pour obtenir des résultats de précision optimaux.
2.Calibrez les paramètres du contrôleur du robot (tels que la longueur des liaisons, les paramètres DH-DHM et/ou les paramètres de mastérisation).
Programmation hors ligne précise
Lorsqu'un robot a été calibré avec RoboDK, nous avons la possibilité d'activer la cinématique précise en cliquant avec le bouton droit de la souris sur le robot et en sélectionnant Utiliser la cinématique précise.
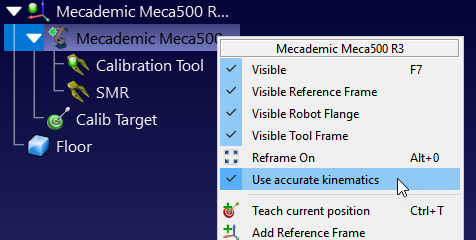
Si la précision est active, nous verrons un point vert, si elle n'est pas active, nous verrons un point rouge.
Il s'agit de l'option recommandée pour obtenir des résultats de précision optimaux. Lorsque l'option de précision du robot est activée dans RoboDK, tous les programmes générés par RoboDK seront automatiquement filtrés. Cela signifie que toutes les coordonnées cartésiennes seront légèrement modifiées pour compenser les erreurs du robot.
C'est l'option la plus appropriée si vous envisagez d'utiliser vos robots pour l'usinage robotisé, de programmer des robots à partir de fichiers NC ou d'utiliser l'un des plugins CAO/FAO pris en charge par RoboDK.
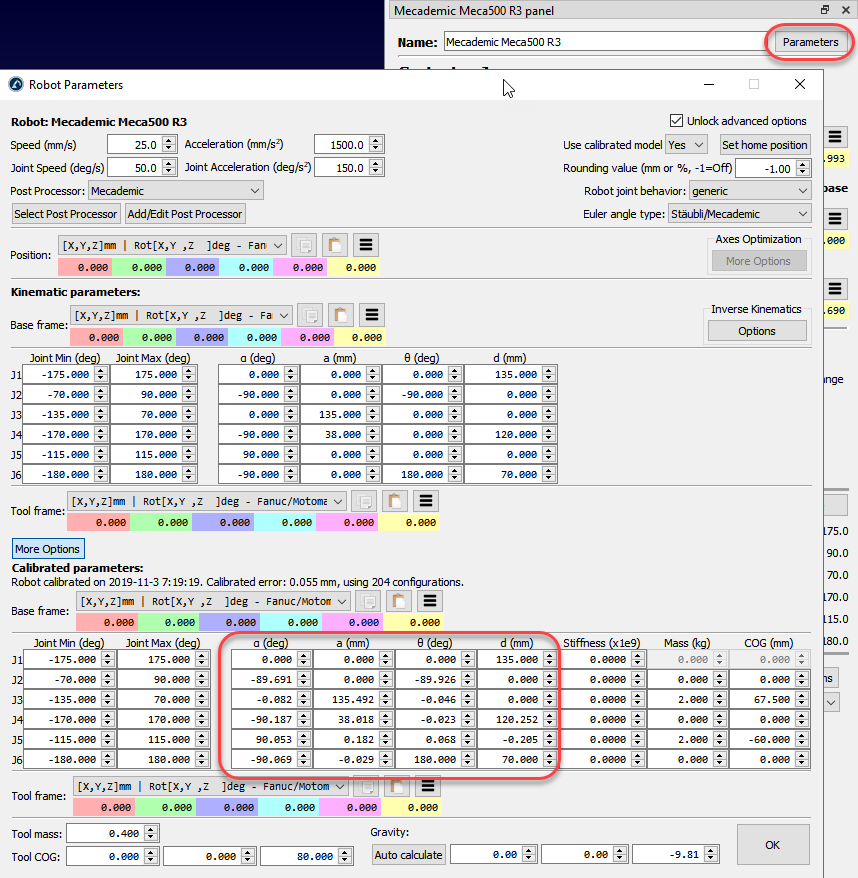
Calibration des paramètres du robot
Une fois le robot calibré, vous pouvez accéder aux paramètres de calibration dans le menu Paramètres. Certains contrôleurs de robot permettent de modifier certains paramètres du robot.