Programmation hors ligne
Vous pouvez utiliser les fonctions d'apprentissage par démonstration sans robot réel. Cela signifie que vous pouvez simuler et programmer votre robot hors ligne uniquement avec votre système de mesure avant d'avoir accès au robot réel.
Vous avez simplement besoin d'une pièce avec un système de coordonnées bien défini que vous pouvez utiliser comme référence.
Une fois que le système de mesure et votre pièce sont prêts, vous pouvez suivre les étapes suivantes pour définir le système de coordonnées de votre dispositif de mesure :
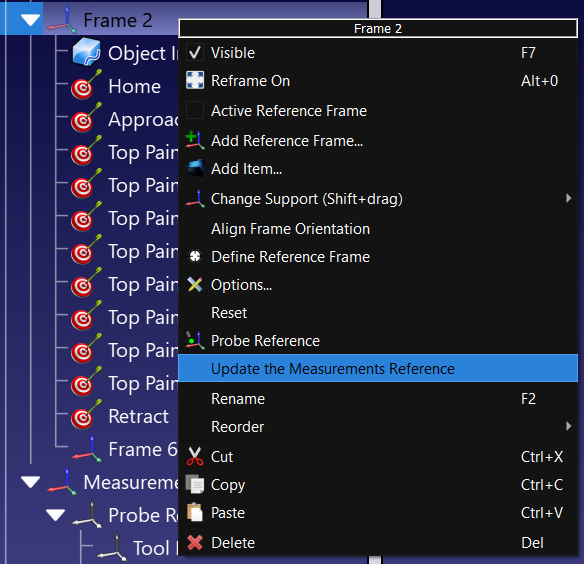
1.Cliquez avec le bouton droit de la souris sur le système de coordonnées de votre pièce (ou sur le système de coordonnées du gabarit auquel elle est attachée).
2.Sélectionnez Mettre à jour la référence des mesures.
3.Suivez les instructions à l'écran pour apprendre 3 points qui définissent le système de coordonnées : l'origine, un point sur X+ et un point sur Y+.
Le système de mesure sera mis à jour en conséquence et vous pourrez procéder à l'apprentissage de points, de courbes ou d'autres systèmes de coordonnées.