Système de coordonnées et outil
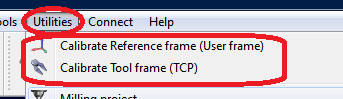
RoboDK fournit quelques outils pour calibrer les systèmes de coordonnées et les d'outils. Vous pouvez accéder à ces outils à partir de Utilities➔ Calibrate Reference frame et Utilities➔ Calibrate Tool frame respectivement.
Pour calibrer un système de coordonnées ou un outil qui n'a pas été calibré automatiquement (également appelé système utilisateur et CDO respectivement), nous avons besoin de certaines configurations de robot touchant 3 points ou plus, ces configurations de robot peuvent être des valeurs d'articulation ou des coordonnées cartésiennes (avec des données d'orientation dans certains cas). Il est recommandé d'utiliser les valeurs des articulations plutôt que les coordonnées cartésiennes, car il est plus facile de vérifier la configuration réelle du robot dans RoboDK (en copiant-collant les articulations du robot dans l'écran principal de RoboDK).
Calibration de l'outil
Sélectionnez Utilities➔ Calibrate tool pour calibrer le CDO à l'aide de RoboDK. Vous pouvez utiliser autant de points que vous le souhaitez, en utilisant différentes orientations. Il est préférable d'utiliser un plus grand nombre de points et des changements d'orientation plus importants car nous obtiendrons une meilleure estimation du CDO ainsi qu'une bonne estimation de l'erreur du CDO.
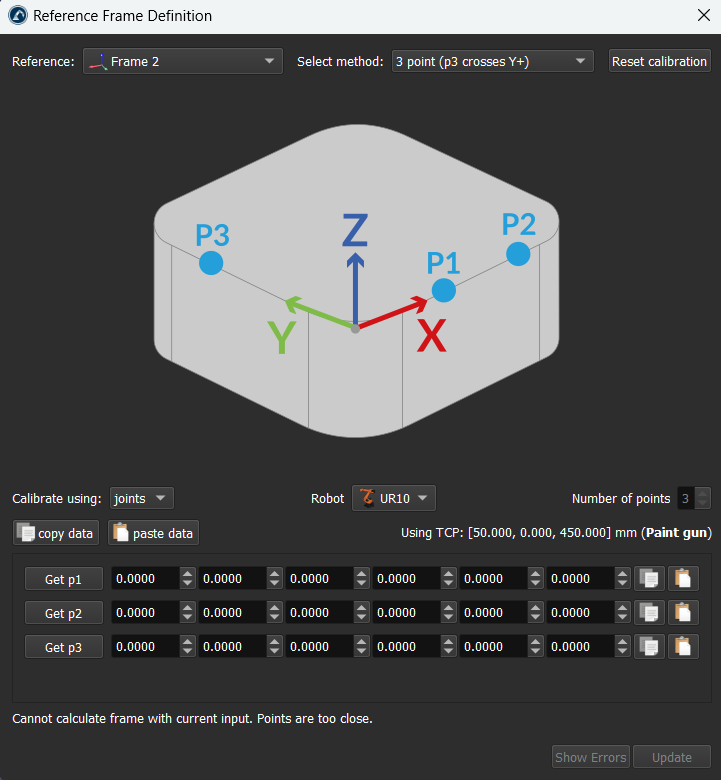
Calibration du système de coordonnées
Sélectionnez Utilities➔ Calibrate reference pour calibrer un système de coordonnées. Il est possible de définir un système de coordonnées en utilisant différentes méthodes. Dans l'exemple de la figure, un système de coordonnées est défini par trois points : les points 1 et 2 définissent la direction de l'axe X et le point 3 définit l'axe Y positif.