RoboDK TwinTrack
RoboDK TwinTrack vous permet d'imiter et de reproduire facilement les mouvements humains avec un robot pour une automatisation rapide et fiable. Vous pouvez enseigner manuellement à votre robot le parcours à suivre de la même manière que vous effectueriez manuellement une opération de fabrication avec vos mains, vous pouvez le suivre et le rejouer avec un robot.
Introduction
RoboDK TwinTrack offre une nouvelle façon d'enseigner les robots par démonstration et peut être utilisé pour de nombreuses applications de fabrication telles que la peinture, le polissage, l'ébavurage, la dépose, le soudage, etc ...
L'un des avantages de l'utilisation d'une méthode d'apprentissage par démonstration telle que TwinTrack est que vous pouvez imiter l'opération de fabrication avec votre robot et que celui-ci reproduira le même mouvement. Cette méthode de programmation des robots ne nécessite pas l'utilisation de modèles 3D. Elle ne nécessite pas non plus l'utilisation d'un ordinateur par l'opérateur. Cela vous permettra de gagner un temps considérable et de commencer à programmer des robots plus rapidement.

RoboDK TwinTrack nécessite un système de mesure 6D et un palpeur manuel ou un outil de fabrication portatif qui vous permet d'imiter l'opération de fabrication avec vos mains.
RoboDK prend en charge plus de 1000 robots provenant de 80 fabricants de robots différents. Cela signifie que vous pouvez programmer n'importe quel bras robotique pris en charge par RoboDK. Vous pouvez également créer vos propres robots et mécanismes.
Avec les outils de calibration TwinTrack et RoboDK, vous pouvez créer des programmes de robot très précis. Avec un bon système de mesure, vous pouvez atteindre une précision de position de 0,150 mm. Le niveau de précision dépend fortement de la qualité et de la taille du robot. En utilisant les outils de calibration RoboDK, vous pouvez créer avec précision votre jumeau numérique.
Exigences
Il est nécessaire d'installer l'Add-in RoboDK TwinTrack et de disposer d'un système de mesure pris en charge pour utiliser les outils TwinTrack.
Veillez à disposer des éléments suivants :
1.Un ou plusieurs bras de robot industriel.
2.Un système de mesure pris en charge (6 DOF). Les systèmes de mesure pris en charge sont les suivants
a.Traceurs HTC Vive (SteamVR)
b.Kit de réalité virtuelle complet (SteamVR)
c.Traceur laser avec capacité de 6 DOF et pilote RoboDK pris en charge
d.Creaform C-Track
e.Système de caméra OptiTrack (il est recommandé d'utiliser 4 PrimeX13 pour une meilleure précision)
1.Le logiciel RoboDK doit être installé et une licence appropriée pour TwinTrack doit être installée.
2.Vous avez besoin de pilotes de robot compatibles avec votre contrôleur de robot si vous souhaitez exécuter automatiquement des programmes de robot.
3.Installez l'Add-in TwinTrack RoboDK :
a.Téléchargez l'Add-in TwinTrack (fichier .rdkp).
b.Double-cliquez sur le fichier pour installer l'Add-in et l'ouvrir dans RoboDK.
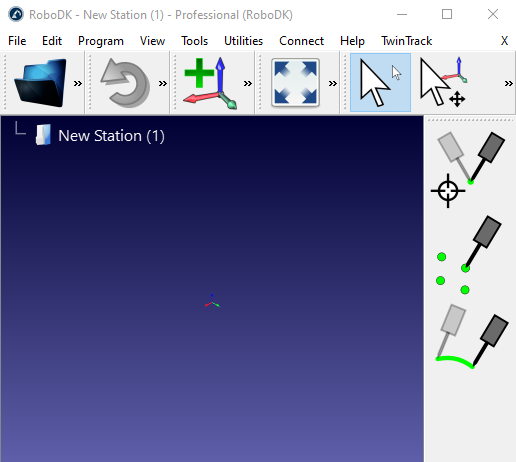
c.Si vous ne voyez pas le menu TwinTrack : sélectionnez Outils➔ Add-in Manager et double-cliquez sur TwinTrack pour voir le menu TwinTrack en haut à droite.
Configuration avec les trackers SteamVR et HTC Vive
Cette section vous guide à travers les étapes de configuration de SteamVR. Vous pouvez utiliser un outil personnalisé avec un tracker pour imiter vos opérations de fabrication avec votre main afin que votre robot puisse reproduire le même mouvement.
RoboDK TwinTrack prend en charge les systèmes de réalité virtuelle et tous les trackers pris en charge par SteamVR, y compris les trackers HTC Vive de v1 à v3.
Suivez ces étapes pour configurer votre système SteamVR pour TwinTrack :
1.Installez Steam si vous ne l'avez pas encore fait, vous devrez peut-être créer un compte sur Steam.
2.Installez SteamVR, il s'agit d'une extension Steam qui ajoute la prise en charge de la réalité virtuelle et du suivi 6D.
3.Si vous n'avez pas de casque de réalité virtuelle ou si vous n'en avez pas besoin, vous pouvez vous en passer en suivant les étapes suivantes :
a.Modifiez le fichier suivant à l'aide d'un éditeur de texte :
C:\NProgram Files (x86)\NSteam\NSteamapps\Ncommon\NSteamVR\Npilotes\Nullité\Nressources\Nparamètres
default.vrsettings
Et définissez :
"enable" : true, (la valeur par défaut est false)
b.Modifiez le fichier suivant à l'aide d'un éditeur de texte :
C:\Program Files (x86)\Steam\steamapps\common\SteamVR\resources\settings\
default.vrsettings
Et définissez :
"requireHmd" : false, (la valeur par défaut est true)
"forcedDriver" : "null", (la valeur par défaut est un "" vide)
"activateMultipleDrivers" : true, (default is false)
Fermez SteamVR et ouvrez-le à nouveau.
4.Ouvrez SteamVR et suivez les instructions pour configurer votre système. Vous pouvez accepter tous les paramètres par défaut si vous n'utilisez pas de casque VR.
5.Associez un traceur à une sonde :
a.Maintenez le bouton d'alimentation du traceur enfoncé pendant 2 secondes pour l'allumer (le voyant du traceur doit devenir bleu si le traceur n'est pas apparié).
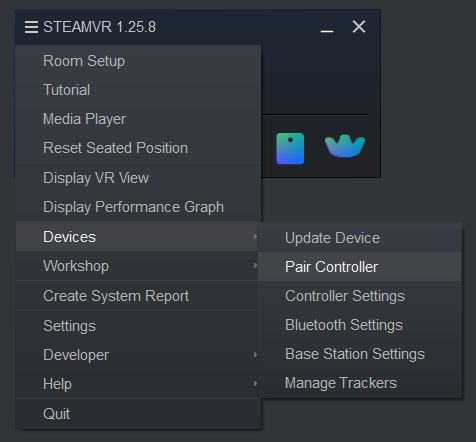
b.Ouvrez le menu➔ Devices➔ Pair Controller
c.Sélectionnez l'option : HTC ViveTracker. Le tracker devrait être apparié automatiquement et le voyant du tracker devrait devenir vert.
Pour supprimer le lien, vous pouvez maintenir le bouton d'alimentation pendant 2 secondes et le voyant doit devenir bleu (il peut clignoter).
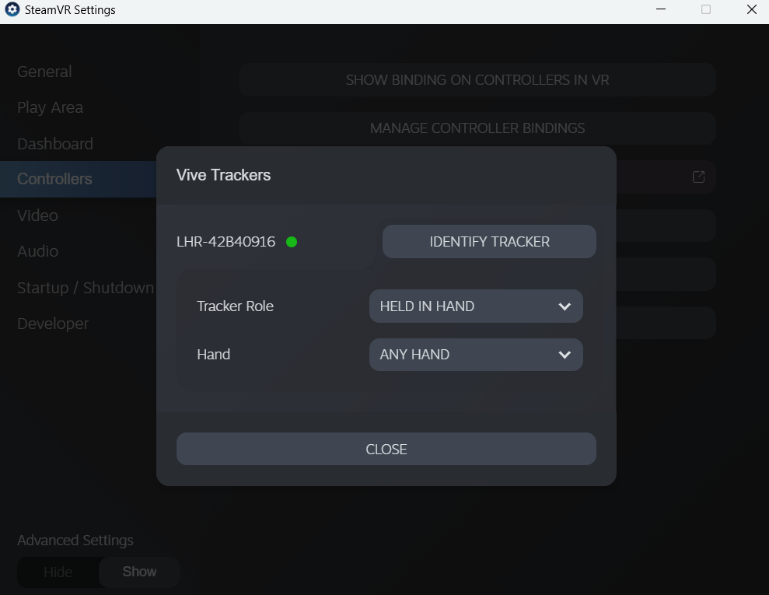
6.Définissez le rôle du suiveur comme tenu en main.
a.Sélectionnez le menu SteamVR➔ Paramètres
b.Sélectionnez les contrôleurs
c.Sélectionnez Gérer les traqueurs
d.Set Tracker Role➔ Tenu en main
e.Réglé sur Toute main (par défaut)
7.Personnalisez les liaisons de votre contrôleur :
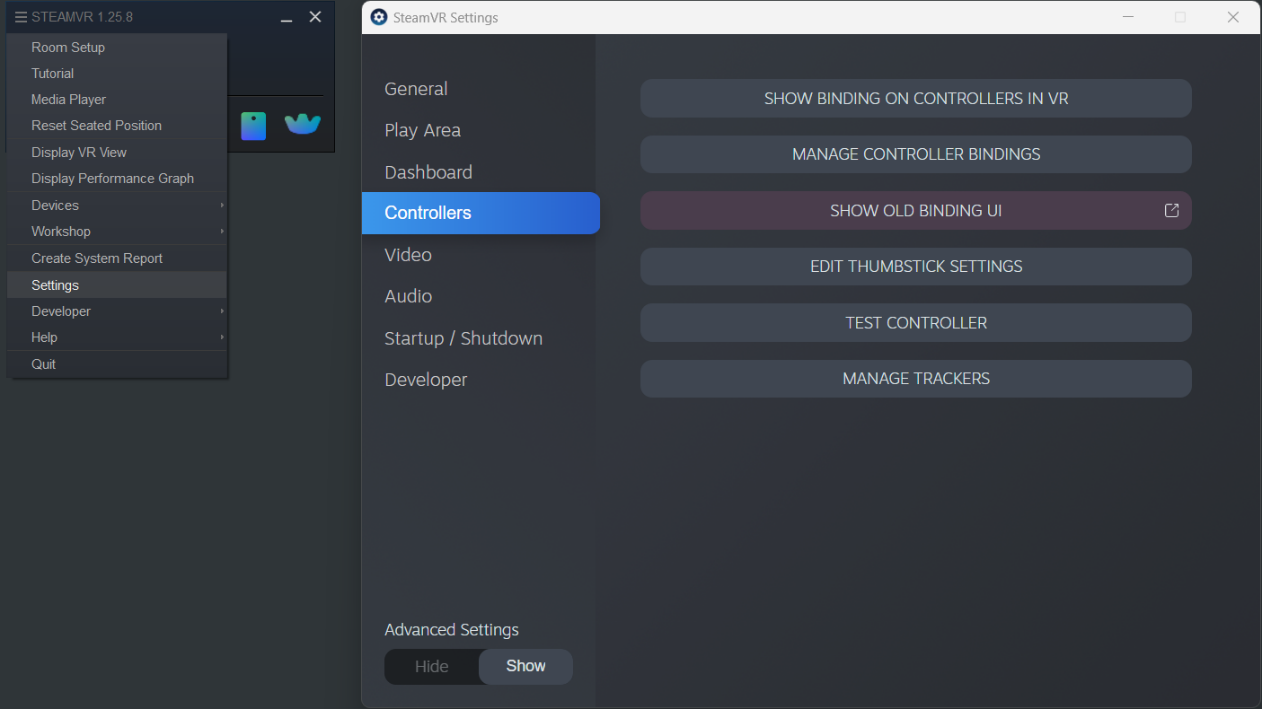
a.Sélectionnez SteamVR➔ Settings
b.Régler les paramètres avancés➔ Show
c.Sélectionnez les contrôleurs
d.Sélectionnez Show Old Bindings UI
e.Sélectionnez RoboDK
f.Sélectionnez le contrôleur actuel et réglez-le sur Vive Tracker in Hand (sauf s'il était déjà réglé).
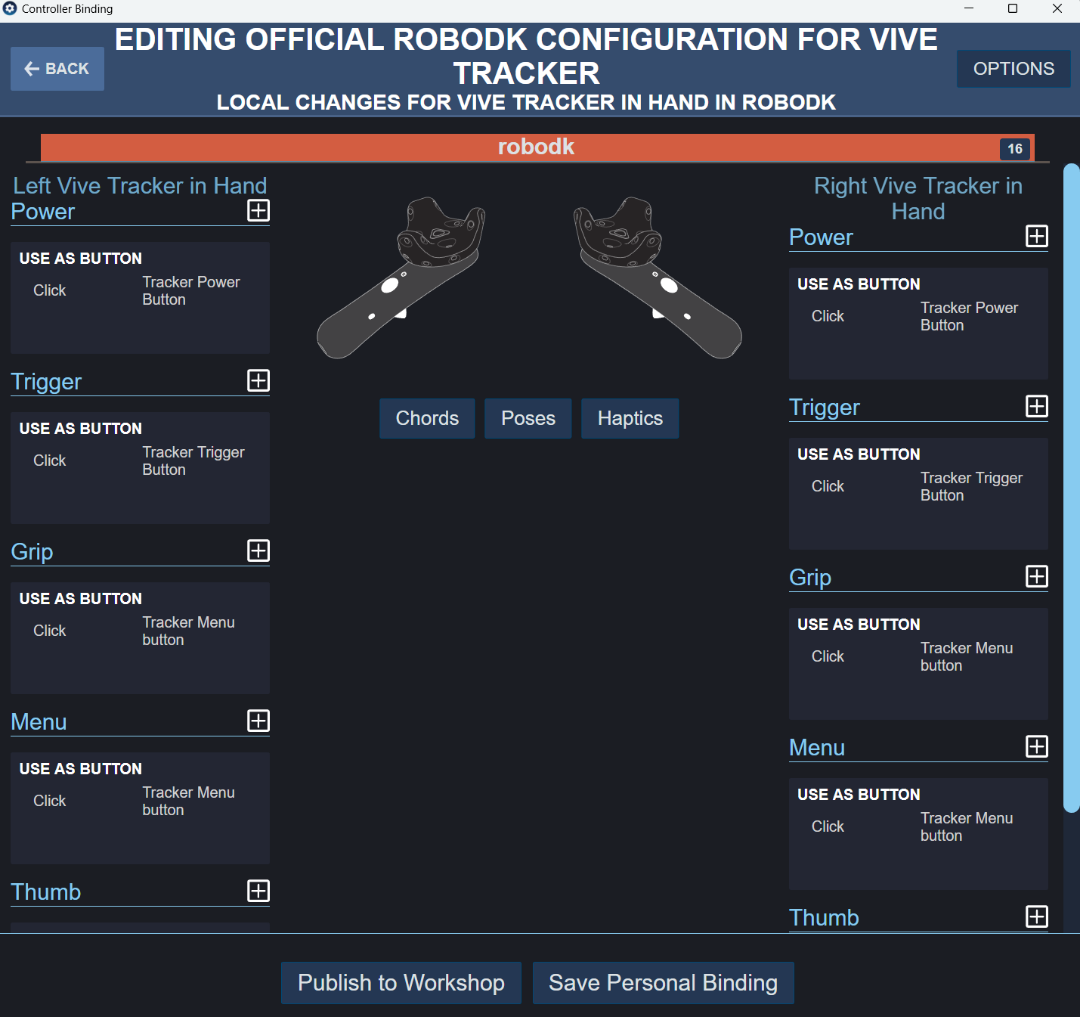
g.Sélectionnez Éditer
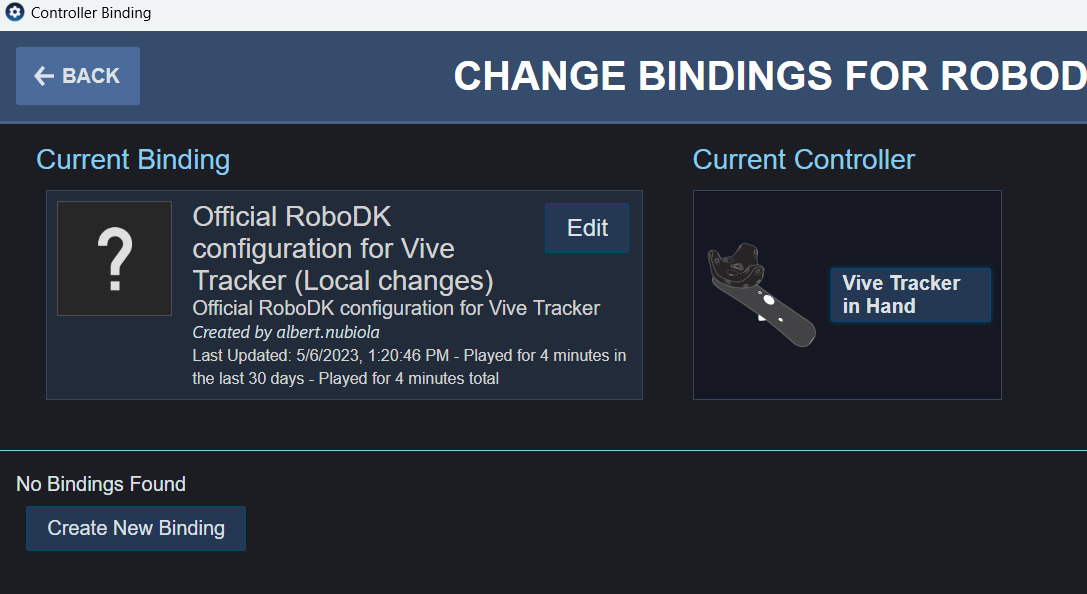
h.Vous devriez voir les liens par défaut pour le tracker.
Configuration
Pour utiliser le système TwinTrack, vous devez charger votre robot dans RoboDK et vous connecter au robot et au système de mesure. Nous pouvons éventuellement modéliser la cellule en ajoutant les modèles 3D des objets et des outils. Cela permettra d'éviter les collisions.
8.Chargez le robot :
a.Sélectionnez File (Fichier)➔ Open online library (Ouvrir la bibliothèque en ligne). La bibliothèque en ligne apparaît dans RoboDK.
b.Utilisez les filtres pour trouver votre robot.
c.Sélectionnez Télécharger pour charger automatiquement le robot dans votre station RoboDK.
d.Vous pouvez également télécharger le fichier du robot directement à partir de la bibliothèque en ligne (https://robodk.com/library) et ouvrir le fichier avec RoboDK (fichier .robot).
9.Connectez le système de mesure :
a.Connectez le système de mesure à votre ordinateur.
b.Sélectionnez Connecter et connectez-vous à votre système de mesure. Assurez-vous que le logiciel requis est également installé. Il se peut que vous deviez modifier l'IP du tracker en fonction du système de mesure que vous utilisez.
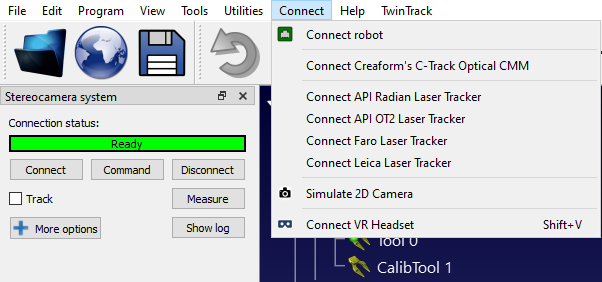
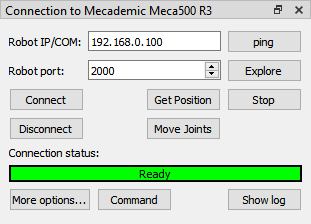
10.Connectez le robot :
a.Sélectionnez Connecter➔ Connecter le robot.
b.Saisissez l'IP et le port du robot.
c.Sélectionnez Connecter.
Calibration du système
Cette section vous guidera dans la calibration de votre robot et de la sonde. Cette étape ne doit être réalisée qu'une seule fois, mais elle est importante pour obtenir de bons résultats en termes de précision.
Avant de commencer la calibration, il est recommandé de charger les modèles 3D de votre cellule. Cela vous aidera à éviter automatiquement les collisions pendant le processus de calibration. Si vous ne disposez pas des modèles 3D de chaque composant, vous pouvez simplement charger des boîtes de plan et des sphères pour représenter les zones auxquelles vous ne voulez pas accéder.
Calibration du robot
Cette section décrit comment calibrer automatiquement votre robot à l'aide de RoboDK TwinTrack et de votre système de mesure. La calibration du robot vous permet d'améliorer la précision du robot jusqu'à 0,150 mm lorsque vous générez des programmes hors ligne ou en utilisant les outils d'apprentissage par démonstration TwinTrack dans RoboDK (le niveau de précision dépend fortement de la qualité et de la taille du robot).
Il est recommandé d'effectuer la calibration du robot après la construction de votre cellule robotisée ou après avoir apporté des modifications importantes (comme le changement de la charge utile de votre outil). Cela permet d'obtenir la meilleure précision possible.
Avant de commencer la calibration, vous pouvez modéliser votre cellule dans RoboDK pour éviter automatiquement les collisions. Vous pouvez utiliser des géométries de base telles que des plans ou des cubes pour éviter les zones indésirables. Vous pouvez également limiter l'espace des articulations du robot.
Vous pouvez sélectionner TwinTrack➔ Calibrer le robot pour lancer la procédure de calibrage du robot.
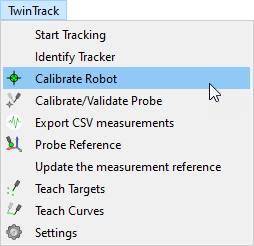
Cette opération vous guidera dans la calibration du robot, y compris la génération automatique de points pour la calibration et la validation. RoboDK peut générer automatiquement des points visibles par le tracker.
La procédure de calibration du robot nécessite la prise d'environ 200 mesures. La procédure commence par des mesures autour de la position initiale du robot
Une fois que la configuration est prête et que la communication avec le robot est correctement établie, la procédure de calibration devrait prendre de 15 à 30 minutes.
Le système ne nécessite pas de dispositifs ou d'accessoires spéciaux, il suit simplement la position de l'outil par rapport à la référence du suiveur.
Il n'y a pas de problème si vous manquez des mesures parce que les cibles ne sont pas visibles.
Calibration du palpeur
Il est important de calibrer correctement le but de votre palpeur et de s'assurer que le palpeur est précise dans les limites des tolérances souhaitées.
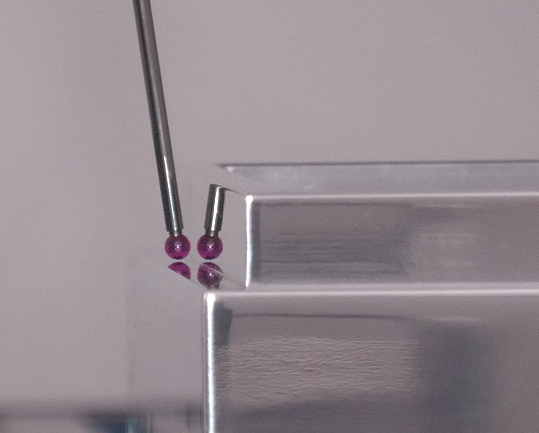
La calibration de la pointe du palpeur s'effectue en déplaçant la pointe autour d'un point statique.
Sélectionnez TwinTrack➔ Calibrer/Valider Probe Tip pour lancer la calibration de l'outil.
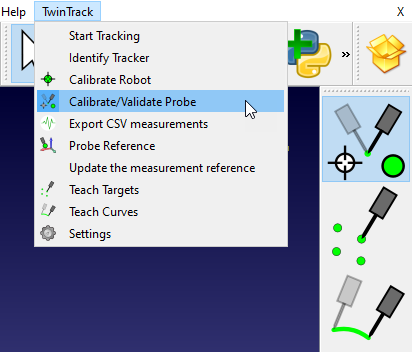
Dans ce cas, comme nous utilisons le HandyProbe de Creaform, vous pouvez calibrer la sonde à l'aide du logiciel VXElements de Creaform et la valider à l'aide de RoboDK.
Pour valider la pointe de votre sonde, il vous suffit de vous déplacer autour d'un point statique et RoboDK affichera la précision.
Programmation hors ligne
Vous pouvez utiliser les fonctions d'apprentissage par démonstration sans robot réel. Cela signifie que vous pouvez simuler et programmer votre robot hors ligne uniquement avec votre système de mesure avant d'avoir accès au robot réel.
Vous avez simplement besoin d'une pièce avec un système de coordonnées bien défini que vous pouvez utiliser comme référence.
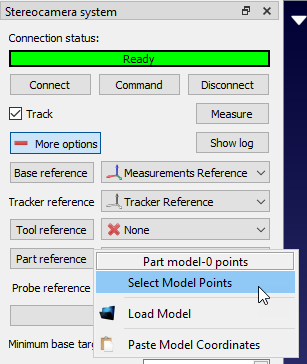
Une fois que le système de mesure et votre pièce sont prêts, vous pouvez suivre les étapes suivantes pour définir le système de coordonnées de votre dispositif de mesure :
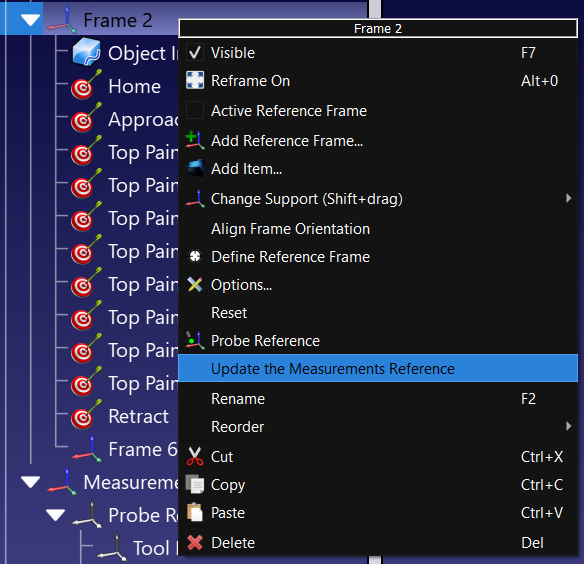
1.Cliquez avec le bouton droit de la souris sur le système de coordonnées de votre pièce (ou sur le système de coordonnées du gabarit auquel elle est attachée).
2.Sélectionnez Mettre à jour la référence des mesures.
3.Suivez les instructions à l'écran pour apprendre 3 points qui définissent le système de coordonnées : l'origine, un point sur X+ et un point sur Y+.
Le système de mesure sera mis à jour en conséquence et vous pourrez procéder à l'apprentissage de points, de courbes ou d'autres systèmes de coordonnées.
Enseigner les cibles
Avec RoboDK TwinTrack, vous pouvez créer des cibles de robot manuellement en enseignant des points avec votre sonde.
Vous pouvez lancer le mode d'apprentissage des cibles en sélectionnant TwinTrack➔ Enseigner Cibles. Ce bouton est également disponible par défaut dans la barre d'outils de TwinTrack.
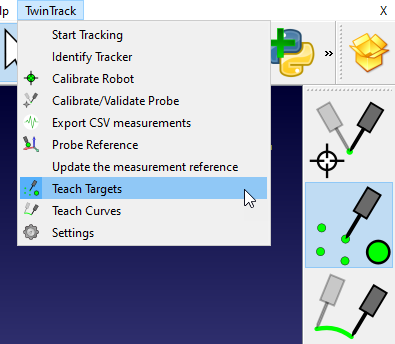
RoboDK calcule et affiche la position du robot en temps réel en fonction de la position de votre main. Vous pouvez facilement voir quelles zones sont accessibles à votre robot.
Avec l'option de création de cibles, vous enseignerez une cible à chaque fois que vous appuierez sur un bouton. Une fois que vous souhaitez créer un programme, vous pouvez appuyer sur le deuxième bouton de votre sonde et RoboDK simulera le programme :
●Premier bouton : enseigner les cibles.
●Deuxième bouton : créer et simuler le programme dans RoboDK.
●Maintenez le deuxième bouton enfoncé : exécuter le programme sur le robot.
Enseigner les courbes
Avec RoboDK TwinTrack, vous pouvez créer des parcours ou des courbes de robot manuellement avec votre sonde.
Vous pouvez lancer le mode d'apprentissage des cibles en sélectionnant TwinTrack➔ Enseigner Courbes. Ce bouton est également disponible par défaut dans la barre d'outils de TwinTrack.
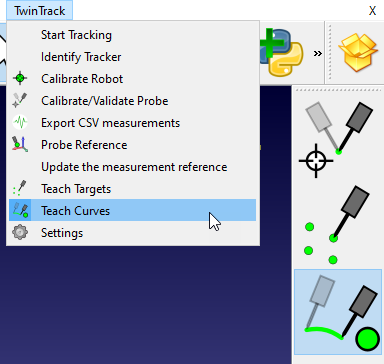
RoboDK calcule et affiche la position du robot en temps réel en fonction de la position de votre main. Vous pouvez facilement voir quelles zones sont accessibles à votre robot.
Vous pouvez créer une courbe en maintenant le premier bouton de votre sonde. Une fois que vous souhaitez créer un programme, vous pouvez appuyer sur le deuxième bouton de votre sonde et RoboDK créera et simulera le programme :
●Maintenez le premier bouton enfoncé : enseigner les courbes/les parcours.
●Deuxième bouton : créer et simuler le programme dans RoboDK.
●Maintenez le deuxième bouton enfoncé : exécuter le programme sur le robot.
Enseigner un système de coordonnées
Avec RoboDK TwinTrack, vous pouvez sonder et localiser vos systèmes de coordonnées pour localiser des objets dans l'espace de travail du robot.
Cliquez avec le bouton droit de la souris sur votre système de coordonnées et sélectionnez Probe Reference.
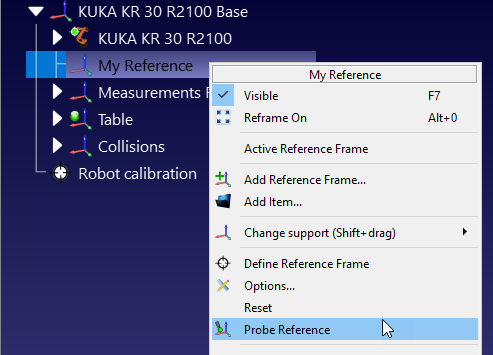
Vous devez ensuite approfondir 3 points dans l'ordre suivant :
1.Premier point à l'origine.
2.Deuxième point le long de l'axe X positif.
3.Troisième point sur l'axe Y positif.
En définissant correctement votre système de coordonnées, vous pouvez programmer des robots à distance. Par exemple, si vous disposez d'un système de fixation correctement défini, lorsque vous souhaitez programmer une nouvelle pièce, vous pouvez simplement le faire depuis votre bureau ou votre domicile, sans même avoir à vous trouver à proximité de votre robot.
Enseigner les courbes en mouvement
Vous pouvez créer des courbes, des cibles et des systèmes de coordonnées sur un objet en mouvement si votre système de mesure permet de suivre plusieurs objets en même temps. Vous pouvez le faire en suivant la même procédure que pour un objet statique.
La principale différence réside dans le fait que l'objet en mouvement doit être suivi en temps réel (à l'aide d'un tracker ou de cibles réfléchissantes). Par exemple, si vous utilisez le système de mesure Creaform C-Track, vous devez spécifier le modèle dans la section de référence de la pièce et le lier au système de coordonnées qu'il représente.
La dépendance correcte des systèmes de coordonnées et des objets doit être définie dans RoboDK afin que vous puissiez définir de nouveaux systèmes de coordonnées par rapport à votre cible mobile.
Cette méthode de programmation des pièces peut ne pas être aussi précise que lorsque les pièces sont statiques.
Paramètres
Cette section décrit les paramètres TwinTrack qui vous permettent de mieux personnaliser le comportement par défaut des actions TwinTrack.
Sélectionnez TwinTrack➔ Paramètres pour ouvrir la fenêtre de paramétrage illustrée dans l'image suivante.
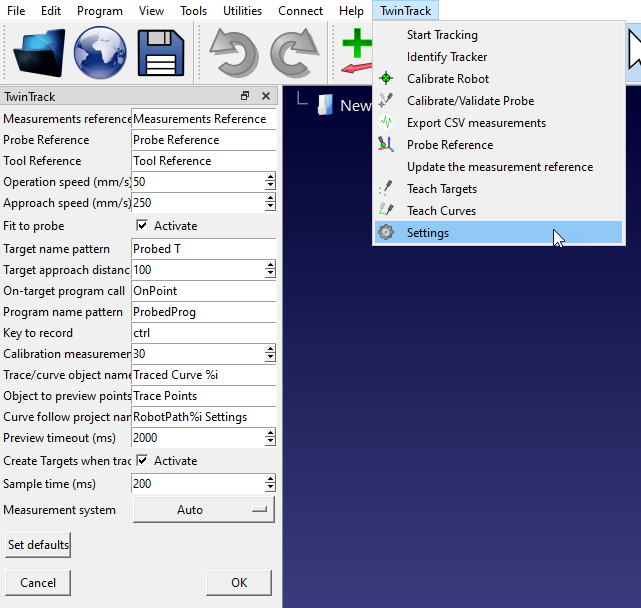
Vous pouvez notamment modifier les noms par défaut utilisés pour afficher l'appareil portatif et les systèmes de référence. Vous pouvez également personnaliser la vitesse d'approche et la distance d'approche.
Filtrage des programmes
Une fois le robot calibré, nous devons nous assurer que nous générons des programmes filtrés ou que nous tenons compte des paramètres calibrés du robot afin de tirer parti de la calibration du robot.
Pour programmer les robots avec précision après l'étalonnage, il convient de suivre une et une seule des méthodes suivantes :
1.Utilisez RoboDK pour la programmation hors ligne afin de générer des programmes précis (les programmes générés sont déjà filtrés). Il s'agit de l'option de programmation hors ligne recommandée pour obtenir des résultats de précision optimaux.
2.Calibrez les paramètres du contrôleur du robot (tels que la longueur des liaisons, les paramètres DH-DHM et/ou les paramètres de mastérisation).
Programmation hors ligne précise
Lorsqu'un robot a été calibré avec RoboDK, nous avons la possibilité d'activer la cinématique précise en cliquant avec le bouton droit de la souris sur le robot et en sélectionnant Utiliser la cinématique précise.
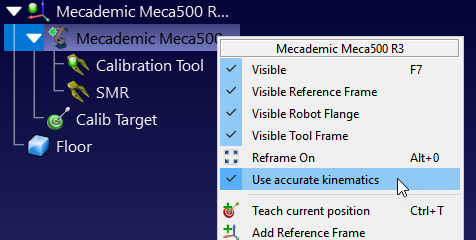
Si la précision est active, nous verrons un point vert, si elle n'est pas active, nous verrons un point rouge.
Il s'agit de l'option recommandée pour obtenir des résultats de précision optimaux. Lorsque l'option de précision du robot est activée dans RoboDK, tous les programmes générés par RoboDK seront automatiquement filtrés. Cela signifie que toutes les coordonnées cartésiennes seront légèrement modifiées pour compenser les erreurs du robot.
C'est l'option la plus appropriée si vous envisagez d'utiliser vos robots pour l'usinage robotisé, de programmer des robots à partir de fichiers NC ou d'utiliser l'un des plugins CAO/FAO pris en charge par RoboDK.
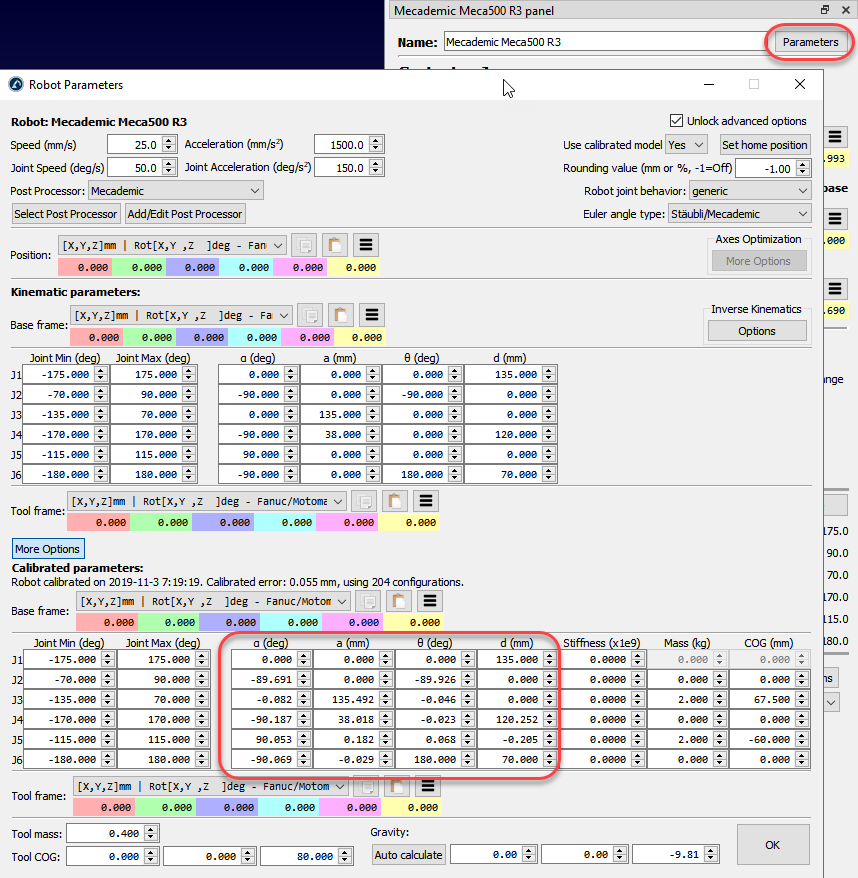
Calibration des paramètres du robot
Une fois le robot calibré, vous pouvez accéder aux paramètres de calibration dans le menu Paramètres. Certains contrôleurs de robot permettent de modifier certains paramètres du robot.
Système de coordonnées et outil
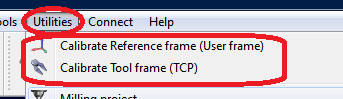
RoboDK fournit quelques outils pour calibrer les systèmes de coordonnées et les d'outils. Vous pouvez accéder à ces outils à partir de Utilities➔ Calibrate Reference frame et Utilities➔ Calibrate Tool frame respectivement.
Pour calibrer un système de coordonnées ou un outil qui n'a pas été calibré automatiquement (également appelé système utilisateur et CDO respectivement), nous avons besoin de certaines configurations de robot touchant 3 points ou plus, ces configurations de robot peuvent être des valeurs d'articulation ou des coordonnées cartésiennes (avec des données d'orientation dans certains cas). Il est recommandé d'utiliser les valeurs des articulations plutôt que les coordonnées cartésiennes, car il est plus facile de vérifier la configuration réelle du robot dans RoboDK (en copiant-collant les articulations du robot dans l'écran principal de RoboDK).
Calibration de l'outil
Sélectionnez Utilities➔ Calibrate tool pour calibrer le CDO à l'aide de RoboDK. Vous pouvez utiliser autant de points que vous le souhaitez, en utilisant différentes orientations. Il est préférable d'utiliser un plus grand nombre de points et des changements d'orientation plus importants car nous obtiendrons une meilleure estimation du CDO ainsi qu'une bonne estimation de l'erreur du CDO.
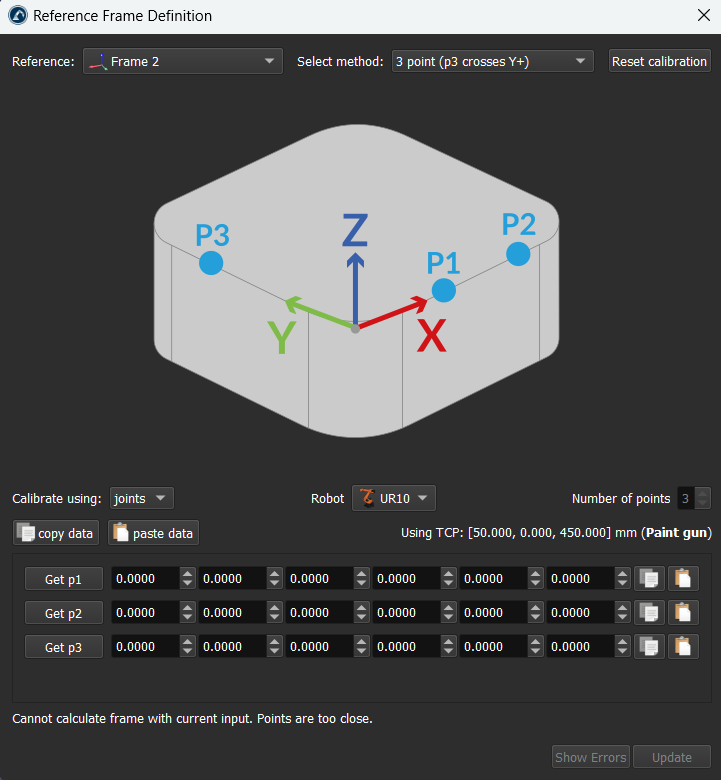
Calibration du système de coordonnées
Sélectionnez Utilities➔ Calibrate reference pour calibrer un système de coordonnées. Il est possible de définir un système de coordonnées en utilisant différentes méthodes. Dans l'exemple de la figure, un système de coordonnées est défini par trois points : les points 1 et 2 définissent la direction de l'axe X et le point 3 définit l'axe Y positif.
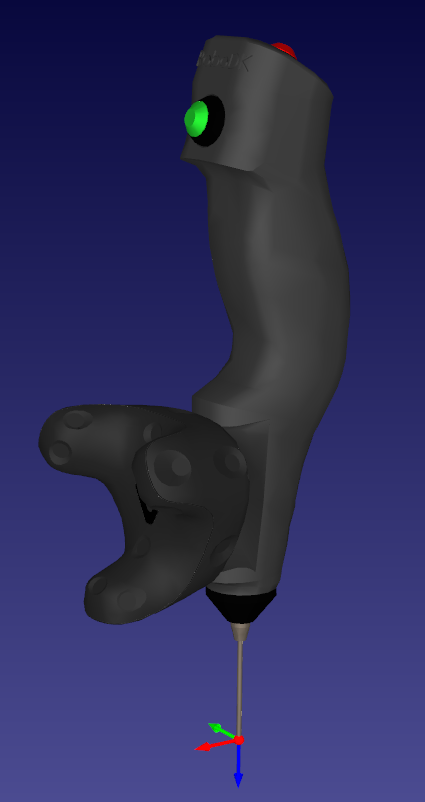
Sonde TwinTrack personnalisée
Cette section montre comment vous pouvez construire votre sonde TwinTrack personnalisée pour enseigner aux robots par démonstration. Une sonde personnalisée vous permet de faire en sorte que vos robots imitent les opérations de fabrication enseignées par un humain.

Composants matériels
La liste suivante de composants matériels vous permet de construire une sonde personnalisée à utiliser avec RoboDK TwinTrack.
1.Un HTC Vive Tracker (toute version supportée, 3.0 recommandée) : HTC Vive Tracker 3 Sur Amazon. Prix estimé : 200 EUR.

2.Deux stations de base Valve Index. En fait, n'importe quelle version devrait fonctionner tant qu'elle est compatible avec le HTV Vive Tracker correspondant. Stations de base Valve sur Amazon. Prix estimé : 500 EUR pour les deux unités.

3.Deux trépieds pour les stations de base Valve. Exemple de pièce sur Amazon. Prix estimé : 100 EUR.

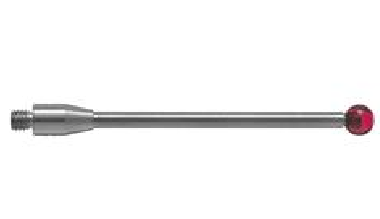
4.Une bille en rubis Renishaw de 40 mm de long et de 4 mm de diamètre. Telle que la A-5003-0060. Prix estimé : 80 EUR.
5.Deux boutons-poussoirs, l'un rouge et l'autre vert, d'un diamètre de 12 mm. Le fait d'appuyer sur le bouton permet d'allumer l'appareil (fermeture du circuit), le fait de relâcher le bouton permet d'éteindre l'appareil (ouverture du circuit) : Exemple de produit sur Amazon. Prix estimé : 15 EUR.

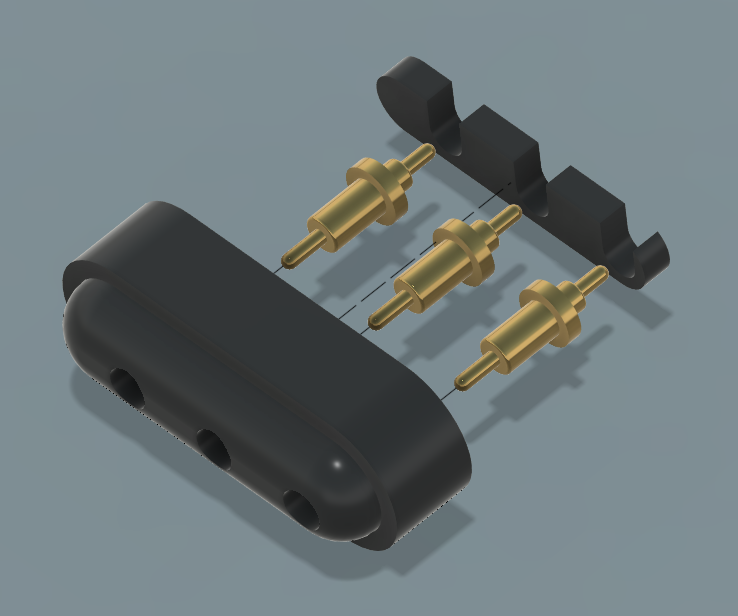
6.Trois pogo pins à ressort 0856-0-15-20-82-14-11-0 (3 unités). Exemple de produit de DigiKey. Prix estimé : 20 EUR.

7.Fil électrique pour connecter les interrupteurs (moins de 1m). Exemple de commande sur Amazon. Prix estimé : 25 EUR.

8.Une vis à tête bombée ¼-20 x 1" : Exemple de produit sur Amazon open. Prix estimé : 10 EUR.

9.Cinq pièces imprimées en 3D, le corps principal, le support de sonde, la sonde supérieure, le connecteur du tracker et le capuchon du connecteur. Vous pouvez télécharger les pièces imprimées en 3D nécessaires à la construction de la sonde TwinTrack ici. Les pièces imprimées en 3D de la sonde TwinTrack sont également disponibles sur GrabCad et Thinginverse.


Assemblage de la sonde
Cette section explique comment vous pouvez assembler la sonde pour RoboDK TwinTrack. Vous aurez besoin des pièces nécessaires pour construire la sonde décrite dans la section précédente. Vous aurez également besoin d'un kit de fer à souder.
Procédez comme suit pour assembler la sonde :
1.Assemblez le connecteur comme suit et collez les pièces imprimées ensemble.
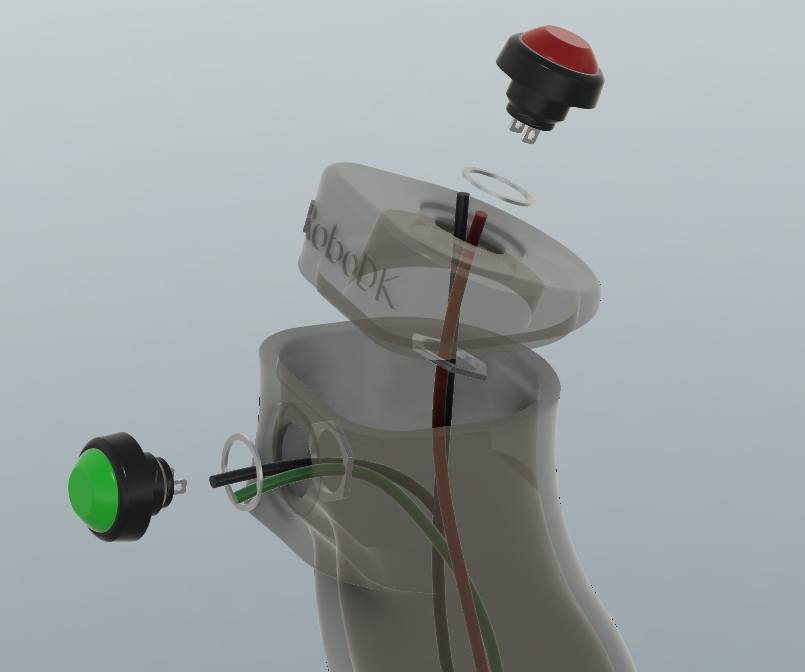
2.Installez les fils à l'intérieur du corps principal et à travers la pièce supérieure, comme indiqué sur l'image suivante. Notez que le fil de terre est connecté aux deux interrupteurs.
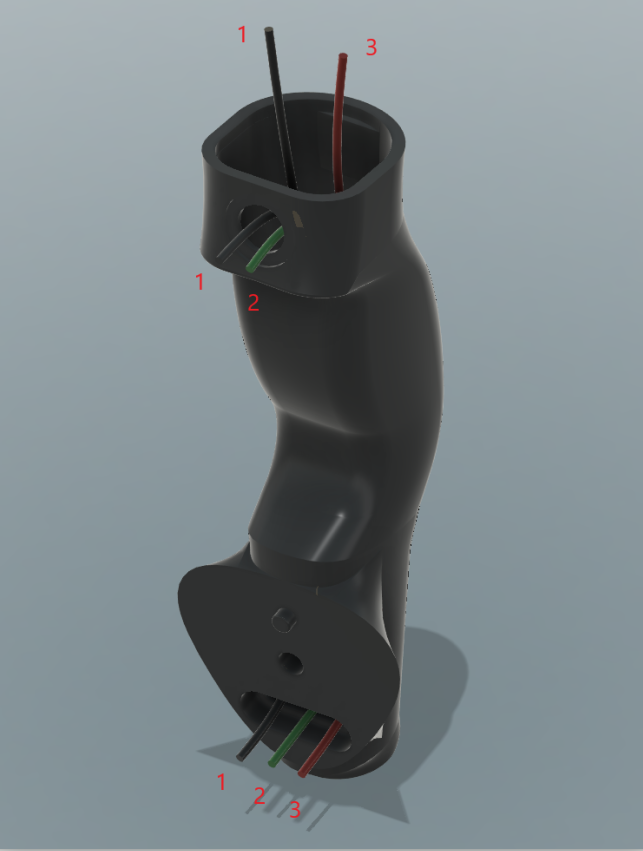
3.Connectez les fils aux interrupteurs. Les deux paires de fils doivent passer par les écrous des interrupteurs. Le fil de l'interrupteur rouge doit également passer par la partie supérieure. Vous devez ensuite souder les interrupteurs (dans cet ordre).
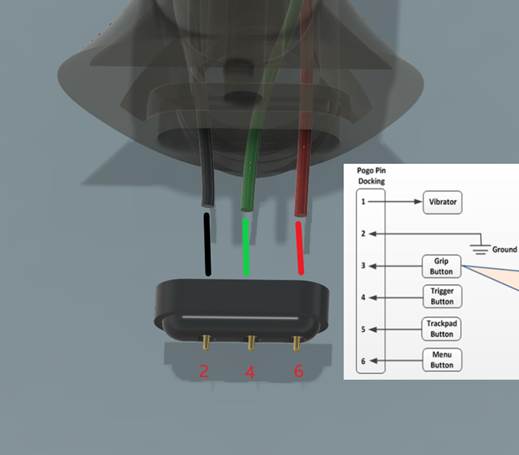
4.Soudez le connecteur aux bons fils. Veillez à placer les câbles sur les bons connecteurs.
5.Assemblez le reste de la sonde comme indiqué dans l'image suivante.
