Utilizzo del controller
È necessario innanzitutto collegare il controller al dispositivo su cui si sta utilizzando RoboDK. L'Add-in mappa movimenti e impostazioni specifici del robot agli input standard del gamepad. La mappatura predefinita è stata creata per un controller Xbox One.
Comandi di movimento
Premere l'icona Avvia controller di gioco nella barra degli strumenti oppure andare su Connetti-Controller di gioco-Avvia controller di gioco. In questo modo si avvierà l'Add-in, che tenterà automaticamente di rilevare il controller collegato. Fare nuovamente clic sull'icona Avvia controller di gioco per arrestare l'Add-in.
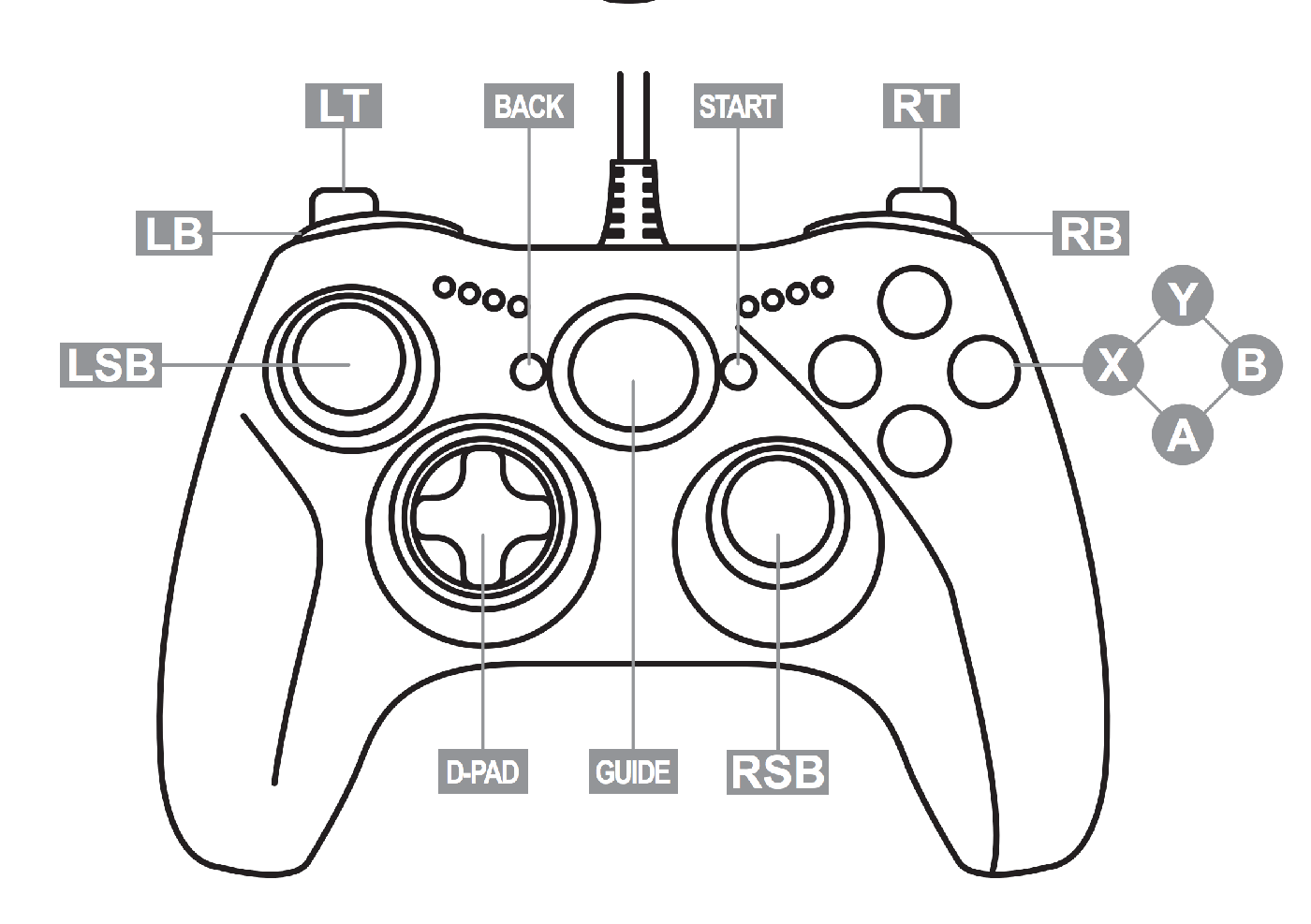
Per muovere il robot, è necessario selezionare un asse e utilizzare il D-pad per applicare il movimento.
1.Selezionare l'asse X: tenere premuto il tasto X sul controller.
2.Selezionare l'asse Y: tenere premuto il tasto Y sul controller.
3.Selezionare l'asse Z: tenere premuto il tasto B sul controller.
4.Spostamento: tenendo premuto un pulsante dell'asse, utilizzare il D-pad verso l'alto o verso il basso per spostare il robot lungo l'asse selezionato.
Interruttori
L'add-in Game Controller offre alcuni pulsanti di attivazione/disattivazione per personalizzare il comportamento.
Altre opzioni per manipolare il movimento del robot includono:
1.Traslazione vs. Rotazione: premere il pulsante della levetta sinistra (LSB) per passare dal movimento lineare del robot (mm) alla rotazione (deg). Per impostazione predefinita viene utilizzata la traslazione (mm).
2.MoveJ vs. MoveL: Premere il pulsante della levetta destra (RSB) per passare dal movimento dei giunti (MoveJ) al movimento lineare (MoveL). L'istruzione di movimento predefinita è MoveJ.
3.Dimensione del passo: utilizzare il D-pad a sinistra o a destra per diminuire o aumentare l'incremento del passo di movimento.
4.Posizione iniziale: premere contemporaneamente entrambi i pulsanti (LB + RB) mentre si attiva il dispositivo di sicurezza per riportare il robot nella sua posizione iniziale.