Game Controller
Introduzione all'Add-in Game Controller
L'Add-in Game Controller per RoboDK è uno strumento efficiente progettato per consentire di guidare manualmente un robot utilizzando un gamepad standard (come un controller Xbox). Questo Add-in è ideale per insegnare rapidamente i bersagli, testare la raggiungibilità del robot o dimostrare i movimenti del robot in un ambiente simulato o reale.
Installazione
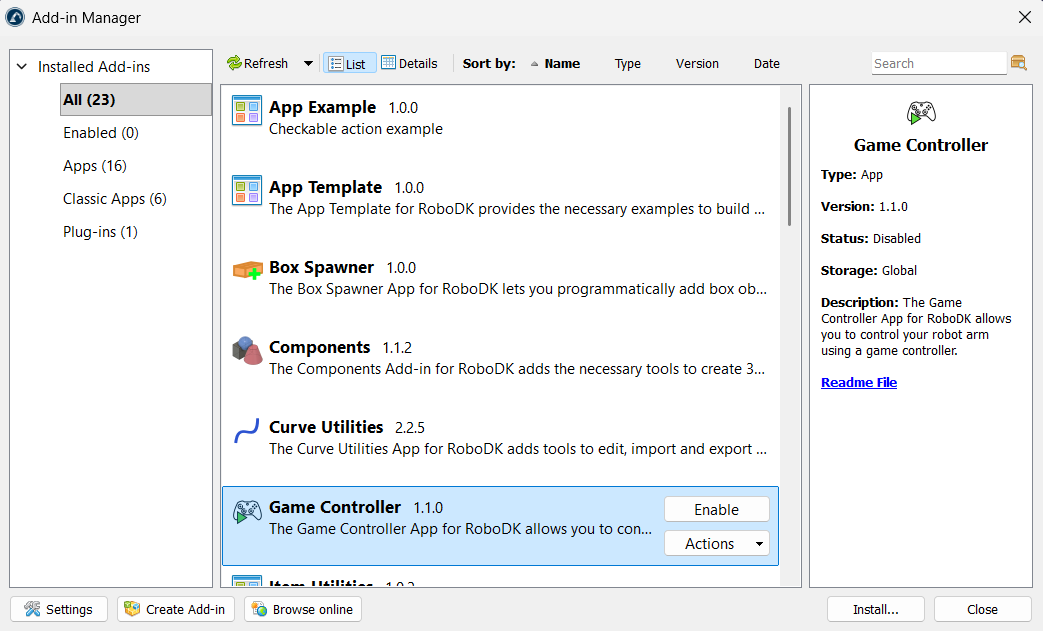
È possibile installare l'Add-inGame Controller dalla Libreria online di RoboDK. Un altro modo per farlo dal software RoboDK stesso è andare su Strumenti-Gestione Add-in e abilitare l'Add-in Game Controller.
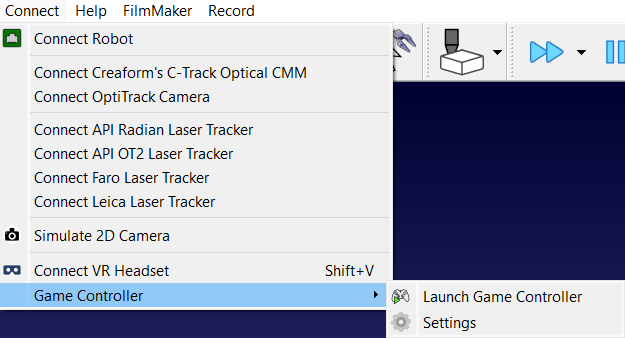
Dopo l'installazione, le opzioni del Game Controller sono disponibili nel menu Connetti. È inoltre possibile trovare l'icona Avvia Game Controller nella barra degli strumenti.
Utilizzo del controller
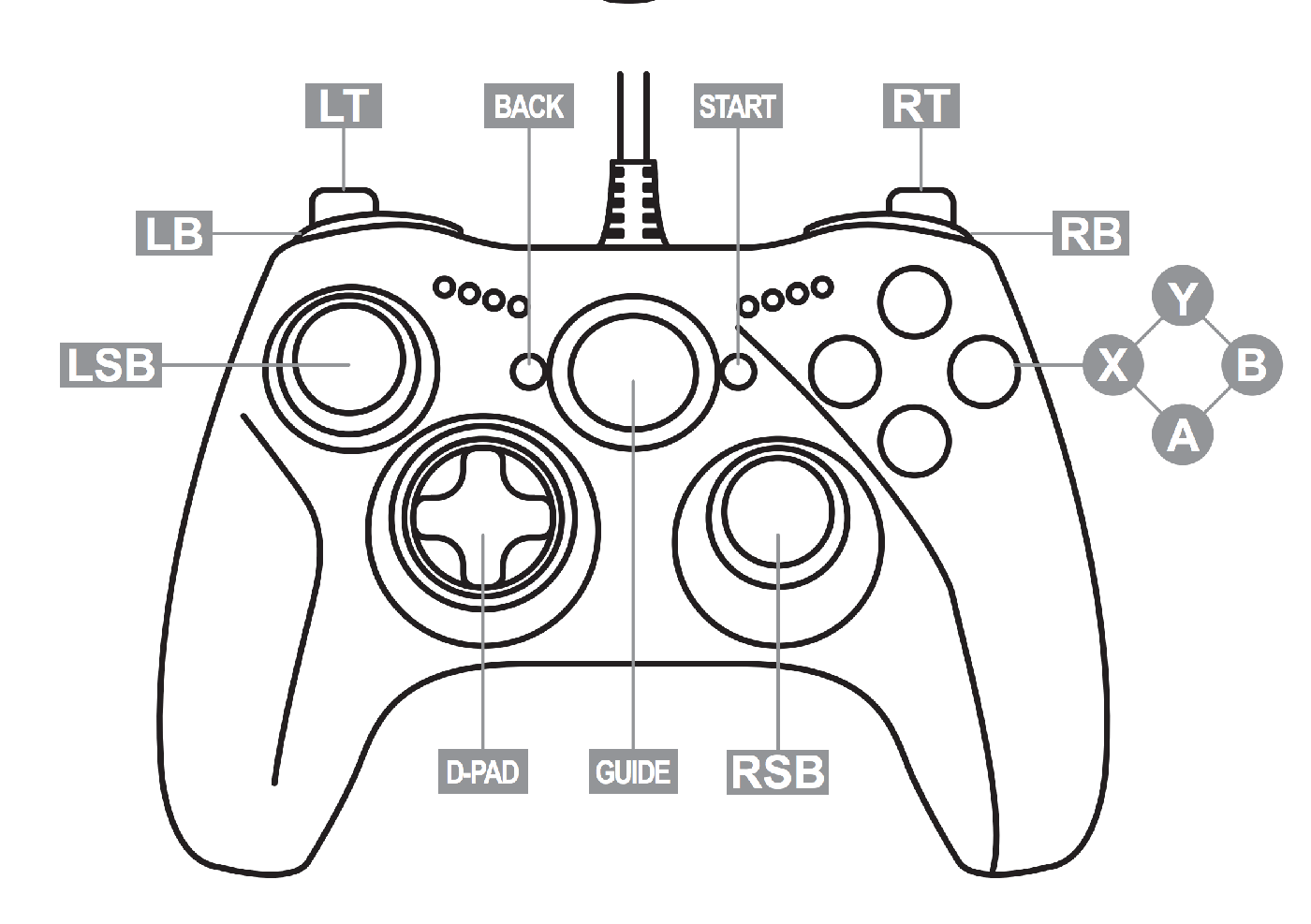
È necessario innanzitutto collegare il controller al dispositivo su cui si sta utilizzando RoboDK. L'Add-in mappa movimenti e impostazioni specifici del robot agli input standard del gamepad. La mappatura predefinita è stata creata per un controller Xbox One.
Comandi di movimento
Premere l'icona Avvia controller di gioco nella barra degli strumenti oppure andare su Connetti-Controller di gioco-Avvia controller di gioco. In questo modo si avvierà l'Add-in, che tenterà automaticamente di rilevare il controller collegato. Fare nuovamente clic sull'icona Avvia controller di gioco per arrestare l'Add-in.
Per muovere il robot, è necessario selezionare un asse e utilizzare il D-pad per applicare il movimento.
1.Selezionare l'asse X: tenere premuto il tasto X sul controller.
2.Selezionare l'asse Y: tenere premuto il tasto Y sul controller.
3.Selezionare l'asse Z: tenere premuto il tasto B sul controller.
4.Spostamento: tenendo premuto un pulsante dell'asse, utilizzare il D-pad verso l'alto o verso il basso per spostare il robot lungo l'asse selezionato.
Interruttori
L'add-in Game Controller offre alcuni pulsanti di attivazione/disattivazione per personalizzare il comportamento.
Altre opzioni per manipolare il movimento del robot includono:
1.Traslazione vs. Rotazione: premere il pulsante della levetta sinistra (LSB) per passare dal movimento lineare del robot (mm) alla rotazione (deg). Per impostazione predefinita viene utilizzata la traslazione (mm).
2.MoveJ vs. MoveL: Premere il pulsante della levetta destra (RSB) per passare dal movimento dei giunti (MoveJ) al movimento lineare (MoveL). L'istruzione di movimento predefinita è MoveJ.
3.Dimensione del passo: utilizzare il D-pad a sinistra o a destra per diminuire o aumentare l'incremento del passo di movimento.
4.Posizione iniziale: premere contemporaneamente entrambi i pulsanti (LB + RB) mentre si attiva il dispositivo di sicurezza per riportare il robot nella sua posizione iniziale.
Funzioni di sicurezza
L'add-in include un meccanismo di protezione obbligatorio per impedire movimenti accidentali.
I movimenti accidentali includono quanto segue:
1.Attivazione della protezione: è necessario tenere premuto il grilletto destro (RT) per consentire qualsiasi movimento del robot. Se il grilletto viene rilasciato, il robot non si muoverà e l'App mostrerà il seguente messaggio:
Si prega di premere il grilletto di sicurezza!
2.Avviso di configurazione: lo Script verifica se il nuovo movimento comporta una modifica nella configurazione del robot (ad es. rotazione del polso). Se viene rilevata una modifica, il movimento viene bloccato e viene visualizzato il seguente avviso per prevenire comportamenti imprevisti:
Configurazione del robot modificata. Ciò può causare movimenti imprevisti! Si prega di muovere il robot tramite RoboDK o di provare un altro comando.
3.Verifica di raggiungibilità: il sistema convalida il movimento utilizzando la cinematica inversa (IK). Se il bersaglio è fuori portata o vicino a una singolarità, appariranno i seguenti messaggi:
Bersaglio irraggiungibile. Provare a utilizzare MoveJ o un altro comando.
Nessuna soluzione per il robot! La nuova posizione è troppo lontana, fuori portata o vicina a una singolarità.
Gestione di dispositivi e robot
Il componente aggiuntivo include una logica per la gestione di più dispositivi o robot all'interno della stazione:
1.Controller multipli: se al PC è collegato più di un controller, l'Add-in visualizzerà un messaggio che indica che sono stati rilevati più controller e utilizzerà per impostazione predefinita il primo rilevato.
2.Robot multipli: se la stazione contiene più di un robot, l'Add-in chiederà all'utente di "Selezionare un robot" da un elenco. Se è presente un solo robot, questo verrà selezionato automaticamente senza chiedere all'utente.
Simulazione vs. robot reale
L'add-in può essere utilizzato sia per la simulazione offline che per il controllo in tempo reale del robot:
1.Modalità Simulazione: la modalità predefinita per testare i movimenti in modo sicuro all'interno della stazione RoboDK.
2.Modalità robot reale: per pilotare un robot fisico, collegarlo tramite Connect-Connect Robot. L'Add-in chiederà se si desidera eseguire l'operazione sul robot reale invece di rimanere in modalità simulazione. Quando si fa clic su Sì, verrà richiesto di inserire l'IP del robot, dopodiché sarà possibile fare clic su Connetti.
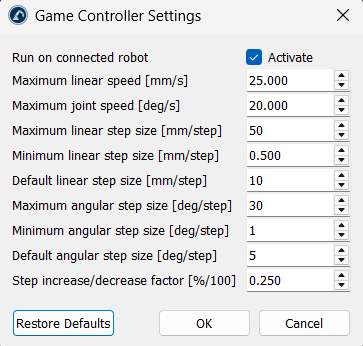
Impostazioni
È possibile trovare ulteriori impostazioni di personalizzazione in Connetti-Controller di gioco-Impostazioni.