Funzioni di IsaacSim Bridge
Questa sezione illustra le funzioni di base dell'Add-in IsaacSim Bridge in IsaacSim.
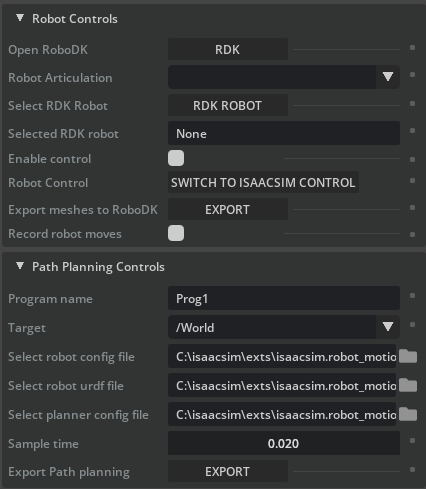
La finestra dell'estensione IsaacSim Bridge contiene i seguenti elementi funzionali:
1.Controlli robot
a.Apri RoboDK: apre RoboDK se non è già aperto o si connette all'istanza di RoboDK attualmente in esecuzione se lo è. Ciò è necessario per il funzionamento dell'estensione.
b.Articolazione robot: seleziona l'articolazione da utilizzare all'interno di IsaacSim.
c.Seleziona robot RDK: seleziona il robot all'interno della stazione RoboDK da utilizzare.
d.Robot RDK selezionato: stampa il nome del robot selezionato.
e.Abilita controllo: abilita la comunicazione del robot tra la scena IsaacSim e la stazione RoboDK.
f.Controllo robot: selezionare il robot di riferimento da utilizzare come robot da abbinare. Se l'opzione visualizza Passa al controllo IsaacSim, RoboDK funge da master e l'articolazione del robot all'interno di IsaacSim seguirà la posa del robot RoboDK selezionato.
g.Esportazione delle mesh in RoboDK: converte gli oggetti Mesh nella scena IsaacSim in file mesh 3D e li carica nella stazione RoboDK. L'origine dell'oggetto convertito sarà alla base della stazione, ma verrà sfalsata in modo che la posizione corrente corrisponda alla sua posizione nella scena IsaacSim. Ciascuno degli oggetti Mesh di IsaacSim sarà un oggetto a sé stante nella stazione RoboDK e potrà essere spostato.
h.Registrazione dei movimenti del robot: registra tutti i movimenti eseguiti dal robot IsaacSim e li aggiunge a un programma all'interno di RoboDK. Ciò è utile se si dispone di un programma all'interno di IsaacSim che si desidera esportare in RoboDK.
2.Controlli di pianificazione del percorso
a.Nome del programma: nome del programma da utilizzare durante l'esportazione in RDK.
b.Bersaglio: menu a tendina di XForms da utilizzare come bersaglio per il pianificatore di percorso RRT.
c.Selezionare il file di configurazione del robot: selezionare il file di configurazione del robot da utilizzare per la pianificazione del percorso. Il formato del file deve essere yaml.
d.Seleziona file urdf del robot: seleziona il file di definizione del robot da utilizzare per la pianificazione del percorso. Il formato del file deve essere urdf.
e.Selezionare il file di configurazione del pianificatore: selezionare il file di configurazione del pianificatore da utilizzare per la pianificazione del percorso. Il formato del file deve essere yaml.
f.Tempo di campionamento: selezionare il tempo di campionamento da utilizzare durante la generazione del percorso. Un tempo di campionamento più breve comporterà un numero maggiore di istruzioni MoveJ nel programma con passi più piccoli tra di esse.
g.Esporta pianificazione del percorso: utilizza RRT per calcolare un percorso tra la posa attuale del robot e il bersaglio selezionato e creare un programma robot con un elenco di istruzioni che completano il percorso.