Giradischi (3x)
Può creare un posizionatore a 3 assi specificando parametri come il raggio della flangia, gli offset laterali e orizzontali, l'altezza e i colori della base, della trave e delle flange.
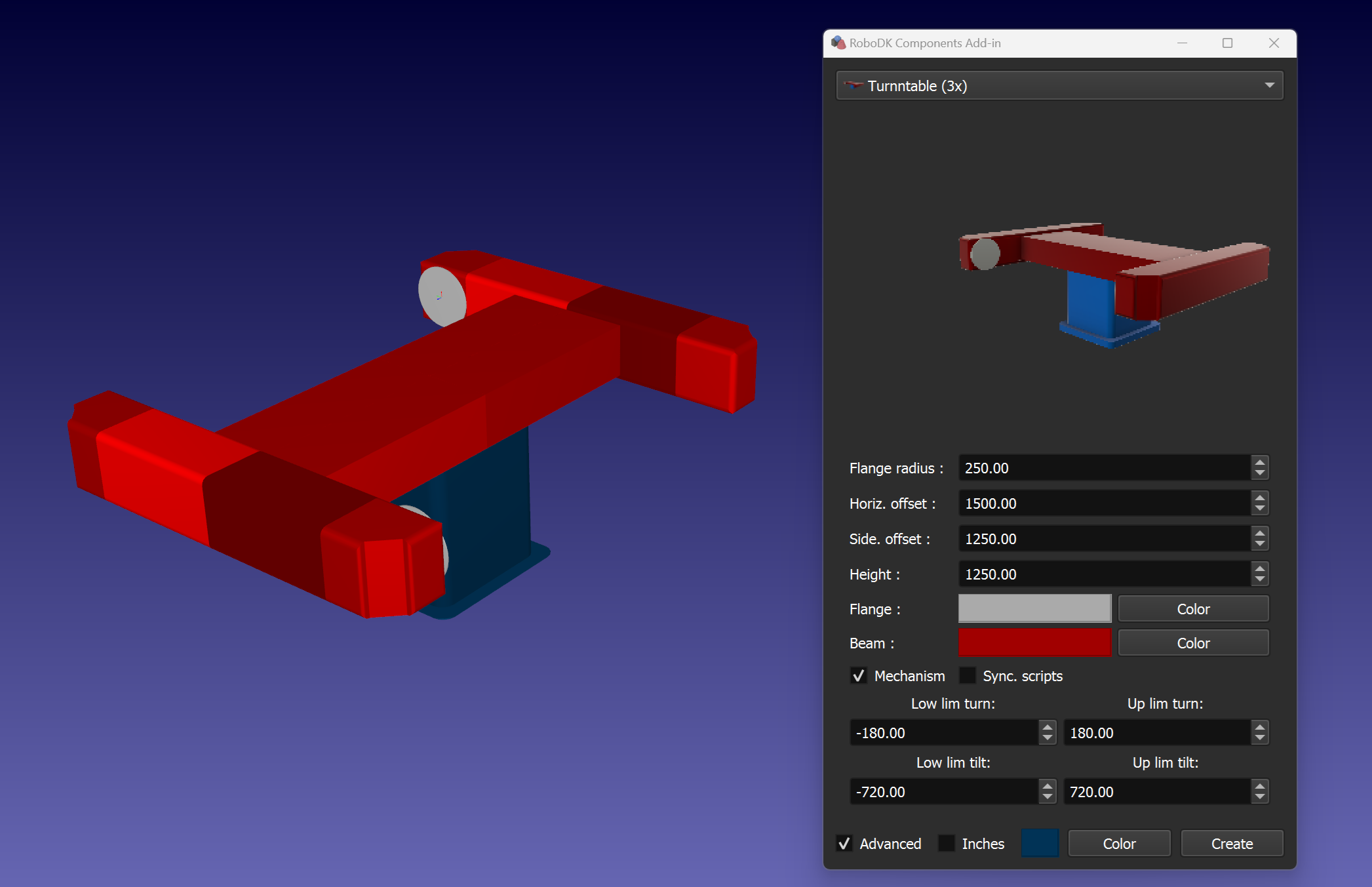
Suggerimento: utilizzi la casella di controllo Meccanismo per creare un meccanismo posizionatore a 3 assi. Può inoltre impostare i limiti di movimento con i parametri corrispondenti.
Suggerimento: utilizzi la casella di controllo Script di sincronizzazione per creare script Python aggiuntivi che sincronizzeranno il robot con l'asse orizzontale richiesto eseguendo lo script corrispondente.
Nota: per impostazione predefinita, la cartella C:\RoboDK\Addins\com.robodk.app.shape\Components\scripts\ è quella che contiene gli esempi di script di sincronizzazione.